 8
LANDASAN TEORI
GPS (Global Positioning System)
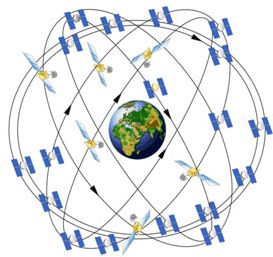
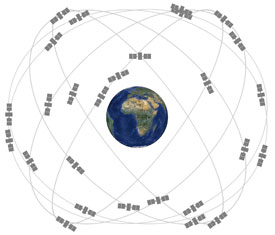
Pada awalnya, GPS dibentuk oleh konstelasi 24 satelit operasional. Konstelasi
ini, dikenal sebagai Initial Operational Capability (IOC), diselesaikan pada Juli 1993,
namun pengumuman resminya dilakukan pada 8 Desember 1993. Tahun-tahun
berikutnya satelit GPS mengalami penambahan dan pergantian baik karena satelit
yang lama terlah rusak maupun untuk meningkatkan performa dari GPS itu sendiri.
Sejauh ini tercatat 31 satelit GPS mengitari bumi, dengan satelit GPS yang terakhir
kali diluncurkan (pada 16 Juli 2011) yaitu GPS IIF SV-2 (
ace/). Konstelasi GPS ditetapkan menjadi blok-
blok sebagai berikut:
)
|
{kind=link}
|
9
-
GPS Blok IIA
Blok IIA merupakan versi peningkatan dari satelit GPS Blok II yang
diluncurkan pada 1989-1990. Angka "II" menunjuk pada "generasi kedua" dari satelit
GPS. Huruf "A" merupakan singkatan dari advanced.
Seri prosuksi IIA dikembangkan oleh Rockwell International (sekarang
menjadi Boeing), memiliki total produksi 19 satelit: Space Vehicle Number (SVN) 22
yang diluncurkan pada November 1990 sampai SVN-40, yang mana diluncurkan pada
November 1997. Tercatat pada Juni 2012 tersisa 10 satelit dari blok ini yang masih
tersisa di konstelasi.
-
GPS Blok IIR
Seri IIR diproduksi untuk menggantikan seri II/IIA yang perlahan mengalami
penurunan performa karena faktor usia. Huruf "R" pada IIR berarti replenishment.
Seri ini dikembangkan oleh Lockhead Martin, terdiri dari total 13 satelit:
SVN-41 sampai 47, SVN-51, SVN-54, SVN-56, dan SVN-59 sampai 61. Peluncuran
pertama yang sukses adalah pada Juli 1997, dan yang terakhir pada November 2004.
Tercatat pada Juni 2012 ada 12 satelit IIR dalam konstelasi GPS, membentuk "tulang
punggung" dari GPS masa kini, bersama seri IIR(M).
-
GPS Blok IIR(M)
Seri IIR(M) merupakan seri peningkatan (upgrade) dari seri IIR,
menyempurnakan "tulang punggung" dari konstelasi GPS masa kini. Huruf "M" disini
berarti modernized, mengacu kepada sinyal GPS militer dan sipil yang dibekali pada
perangkat angkasa luar generasi sekarang.
|
|
10
Dikembangkan oleh Lockhead Martin, ada 8 satelit IIR(M): SVN-48 sampai
SVN-50, SVN-52, SVN-53, SVN-55, SVN-57, dan SVN-58. Seri IIR(M) pertama
diluncurkan pada September 2005, dan seri terakhirnya pada Agustus 2009. Tercatat
Juni 2012 ada 7 satelit IIR(M) yang dinyatakan sehat dalam konstelasi GPS, dan
SVN-49 dinyatakan "unusable".
-
GPS Blok IIF
Seri IIF memusatkan pada kemampuan seri IIR(M) dengan penambahan pada
sinyal untuk sipil pada frekuensi yang diproteksi untuk keamanan transportasi. Huruf
"F" disini berarti follow-on. Dibandingkan dengan generasi sebelumnya, satelit GPS
IIF memiliki jangka waktu hidup yang lebih lama, tingkat akurasi, sinyal dan kualitas
yang lebih tinggi.
Seri yang dikembangkan oleh Boeing ini memiliki total 12 satelit: SVN-62
sampai 73. Satelit IIF pertama diluncurkan pada Mei 2010. Tercatat Juni 2012, ada 2
satelit IIF yang aktif di konstelasi GPS.
Segmen-segmen GPS
Menurut Ahmed El-Rabbany (Introduction to GPS, 2002), GPS terdiri
atas tiga segmen yaitu space segment, control segment, user segment, berikut
ini adalah penjelasannya:
|
|
11
1. Space Segment
Space segment terdiri atas konstelasi 24 satelit. Masing-masing satelit
mengirimkan sebuah sinyal, yang memiliki sejumlah komponen: dua buah
gelombang sinus (yang juga dikenal sebagai carrier frequency / frekuensi
pembawa), dua kode digital, dan sebuah pesan navigasi. Pesan kode dan
navigasi ditambahkan ke dalam pembawa sebagai modulasi dua fasa biner.
Pembawa dan kode digunakan terutama untuk menentukan jarak dari receiver
pengguna sampai ke satelit GPS. Pesan nagivasi berisi koordinat (lokasi)
satelit sebagai fungsi waktu bersama dengan informasi-informasi lain.
2. Control Segment
Segmen kontrol dari sistem GPS terdiri atas jaringan lima stasiun
pemantau di seluruh pelosok dunia, dengan stasiun kontrol utama (master
control station / MCS) berlokasi di dekat Colorado Springs, Colorado,
Amerika Serikat. Tugas utama segmen kontrol operasional adalah menjejaki
satelit GPS dengan tujuan untuk menentukan dan memprediksikan lokasi
satelit, integritas sistem, jam atom satelit, data atmosfer, perkiraan satelit, dan
pertimbangan-pertimbangan lain. Informasi ini kemudian digabungkan dan di-
upload ke satelit GPS melalui jalur S-band.
|
|
12
3. User Segment
User segment mencakup semua pengguna militer dan sipil. Dengan
sebuah penerima GPS yang terhubung dengan antena GPS, seorang pengguna
dapat menerima sinyal GPS, yang dapat digunakan untuk menentukan posisi
pengguna tersebut di manapun di bumi. Saat ini GPS tersedia bagi siapapun di
seluruh dunia tanpa biaya apapun.
Cara Kerja GPS
Secara teoritis, GPS bekerja dengan cara mengumpulkan data dari
minimal 3 satelit, masing-masing mengenai jarak dari sebuah titik di bumi
(GPS receiver) bersamaan dengan lokasi satelit tersebut. Dari semua data itu,
lokasi titik (GPS receiver) dapat ditentukan dengan cara menerapkan konsep
triangulasi. Dalam hal ini, alat penerima akan berada pada titik potong tiga
bidang bola; masing-masing dengan radius sebesar jarak alat penerima ke
satelit, dengan satelit itu sebagai pusat bola. Dengan demikian, posisi titik itu
dapat diketahui.
Pada praktiknya, satelit keempat dibutuhkan untuk perhitungan
sinkronisasi clock dari penerima GPS. Akurasi yang diperoleh dengan metode
ini terbatas pada 100 meter untuk komponen horizontal, 156 meter untuk
vertikal, dan 340 nanodetik untuk komponen waktu, semua pada tingkat
probabilitas sebesar 95% (Ahmed El-Rabbany, 2002). Tingkat keakuratan
yang rendah ini diakibatkan oleh teknik selective availability, yaitu teknik
|
|
13
yang digunakan untuk menurunkan akurasi posisi waktu nyata independen
bagi pengguna yang tak berhak.
Dengan keputusan pemerintah Amerika Serikat tanggal 1 Mei 2000
untuk penghentian selective availability, akurasi horizontal dapat naik menjadi
22 meter (dengan tingkat probabilitas 95%). Untuk lebih lagi meningkatkan
akurasi GPS, digunakan metode diferensial, yang menggunakan dua alat
penerima bersamaan. Dalam kasus ini, tingkat keakuratan yang diperoleh
mencapai beberapa meter saja.
Format Data Keluaran GPS
Perusahaan-perusahaan pembuat
GPS memiliki formatnya masing-
masing untuk menyimpan hasil pengukuran GPS, sehingga sulit untuk
menggabungkan data dari alat GPS yang berbeda (Ahmed El-Rabbany,
Introduction to GPS, 2002, p101). Masalah yang mirip terjadi saat ingin
melakukan antarmuka terhadap berbagai alat yang berbeda, termasuk sistem
GPS. Untuk mengatasi masalah ini, banyak peneliti yang membuat format
standar untuk berbagai keperluan penggunanya. Format standar yang banyak
digunakan saat ini ada empat, yaitu:
1. RINEX
RINEX dibuat oleh sekelompok peneliti untuk mengatasi kesulitan
mengkombinasikan data biner dari penerima GPS yang berbeda. Data RINEX
merupakan format standar ASCII, sehingga meskipun memakan tempat yang
|
|
14
lebih banyak dalam penyimpanannya namun hal itu juga berarti fleksibilitas
dalam distribusi.
2. NGS-SP3
NGS-SP3 dibangun oleh U.S. NGS yang merupakan akronim dari
Standard Product #3, yang datanya berupa dokumen ASCII yang berisi data
orbital yang presisi dan koreksi clock satelit yang bersangkutan.
3. RTCM SC-104 untuk Layanan DGPS
Format ini merupakan format standar industri untuk mengirimkan
koreksi waktu nyata DGPS yang diajukan oleh Radio Technical Commission
for Maritime Services untuk memastikan operasi yang efisien dan koreksi
pseudorange.
4. NMEA 0183
NMEA merupakan akronim dari National Marine Electronics
Association, yang formatnya diadopsi sebagai format untuk antarmuka alat-
alat elektronik kelautan. Format ini juga menggunakan data dalam format
ASCII.
Standar format NMEA merupakan format ASCII yang dikirim dengan
kecepatan 4800 bps. Aliran data dapat berupa informasi mengenai posisi, data
faktual hasil pengukuran, kedalaman air, dan variabel-variabel lain. Data ini
|
|
15
dikirim dalam bentuk kalimat-kalimat; masing-masing dimulai dengan sebuah
tanda dollar “$” dan diakhiri dengan <CR> <LF>.
Berikut ini adalah penjelasan mengenai beberapa kalimat yang sering
digunakan dalam format NMEA:
1. RMB (Recommended Minimum Navigation Information)
RMB adalah kalimat “rekomendasi navigasi minimum”, dan dikirim
setiap kali sebuah rute atau sebuah goto (seperti misalnya menetapkan tujuan
(waypoint)) diaktifkan. Beberapa sistem di-set untuk mengirimkan kalimat ini
sepanjang waktu, mengirimkan data null jika tidak ada goto yang dipilih,
sementara pada sistem lain hanya mengirimkannya saat diperlukan. Format
kalimatnya adalah:
$GPRMB,A,x.x,a,c--c,d--
d,llll.ll,e,yyyyy.yy,f,g.g,h.h,i.i,j*kk
Di mana
RMB : Informasi rekomendasi navigasi minimum
A : Status data (A = Active, V = Void)
x.x : Cross-track error (diukur dalam mil laut, nilai maksimumnya 9.99)
a : Arah kemudi untuk memperbaiki cross-track error (L = Left, R = Right)
c--c : Nomor identitas waypoint asli
d--d : Nomor identitas waypoint tujuan
llll.ll : Garis lintang (latitude) waypoint tujuan
e : N (North) atau S (South) untuk latitude
|
|
16
yyyyy.yy : Garis bujur (longitude) waypoint tujuan
f : E (East) atau W (West) untuk longitude
g.g : Jarak ke tujuan (diukur dalam mil laut, nilai maksimumnya 999.9)
h.h : Arah untuk sampai ke tujuan, dalam derajat
j : Status kedatangan (A = arrived, V = not arrived)
2. RMC (Recommended Minimum Specific GPS/TRANSIT Data)
Kalimat RMC merupakan data ekuivalen NMEA untuk PVT (Position,
Velocity, Time yaitu Posisi, Kecepatan, Waktu). Format kalimatnya adalah:
$GPRMC,hhmmss.ss,A,llll.ll,e,yyyyy.yy,f,x.x,y.y,ddmmyy,z.
z,a*hh
Di mana
RMC : Recommended Minimum Sentence C
hhmmss.ss : Waktu saat pemosisian, dalam UTC (Universal Time
Coordinated)
A : Status data (A = Active, V = Void)
llll.ll : Garis lintang (latitude) waypoint tujuan
e : N (North) atau S (South) untuk latitude
yyyyy.yy : Garis bujur (longitude) waypoint tujuan
f : E (East) atau W (West) untuk longitude
x.x : Kecepatan terhadap tanah pantauan (dalam mil laut)
y.y : Sudut penjejakan yang dipantau (dalam derajat)
ddmmyy : Tanggal UT (Universal Time)
|
|
17
z.z : Variasi magnetik
a : E (East) atau W (West) untuk variasi magnetik
*hh : Checksum
3. GGA (Global Positioning System Fix Data)
Kalimat GGA menyediakan lokasi 3 dimensi dan data keakuratan.
Format kalimatnya adalah:
$GPGGA,hhmmss.ss,llll.ll,e,yyyyy.yy,f,a,bb,x.x,y.y,M,z.z,
M,s.s,####*hh
Di mana
GGA : Global Positioning System Fix Data
hhmmss.ss : Waktu saat pemosisian, dalam UTC (Universal Time
Coordinated)
llll.ll : Garis lintang (latitude) waypoint tujuan
e : N (North) atau S (South) untuk latitude
yyyyy.yy : Garis bujur (longitude) waypoint tujuan
f : E (East) atau W (West) untuk longitude
1 : Kualitas pemosisian GPS
0 = invalid
1 = Pemosisian GPS (SPS)
2 = Pemosisian DGPS
3 = Pemosisian PPS (Precise Positioning Service)
4 = RTK (Real Time Kinematic)
|
|
18
5 = Float RTK
6 = Perkiraan (dead reckoning/perhitungan mati)
7 = Input secara manual
8 = Mode simulasi
bb : Jumlah satelit yang digunakan untuk menjejaki
x.x : Kesalahan horizontal (dilusi atau presisi)
y.y,M : Ketinggian antena (dalam meter)
z.z,M : Ketinggian geoid (permukaan air laut rata-rata), dalam meter
s.s : Waktu (dalam detik) sejak update terakhir
#### : Identitas stasiun DGPS
*hh : Checksum
4. VTG (Actual Track Made Good and Speed Over Ground)
Kalimat ini menyediakan informasi kecepatan terpantau
$GPVTG,t,T,?,??,s.ss,N,S.SS,K*hh
Di mana
VTG : Track kecepatan di darat
t : Penjejakan sebenarnya
T : Teks yang sudah pasti (tetap) ini mengindikasikan bahwa penjejakan yang
dipantau relatif terhadap utara
? : tidak digunakan
?? : tidak digunakan
s.ss : Kecepatan terhadap tanah (dihitung dalam mil laut)
|
|
19
N : Teks yang sudah pasti (tetap) ini mengindikasikan bahwa kecepatan
terhadap tanah adalah dalam knot
S.SS : Kecepatan terhadap tanah (dihitung dalam kilometer per jam)
K : Teks yang sudah pasti (tetap) ini mengindikasikan bahwa kecepatan
terhadap tanah adalah dalam kilometer per jam
*hh : Checksum
5. RMA (Navigation Data from Present Position)
Kalimat ini menyediakan data navigasi berdasarkan posisi sekarang,
format kalimatnya adalah:
$GPRMA,A,llll.ll,e,yyyyy.yy,f,?,??,s.ss,ccc,zz.z,a*hh
Di mana
RMA : Data navigasi posisi sekarang
A : Status data (A = Active, V = Void)
llll.ll : Garis lintang (latitude) waypoint tujuan
e : N (North) atau S (South) untuk latitude
yyyyy.yy : Garis bujur (longitude) waypoint tujuan
f : E (East) atau W (West) untuk longitude
? : tidak digunakan
?? : tidak digunakan
s.ss : Kecepatan terhadap tanah (diukur dalam mil laut)
ccc : Arah terhadap daratan
zz.z : Variasi magnetik (variasi ke Timur dikurangi dari arah sesungguhnya)
|
|
20
a : E (East) atau W (West) untuk variasi magnetik
*hh : Checksum
6. GSA (GPS DoP and Active Satellites)
Kalimat ini menyediakan informasi terinci pada pemosisian oleh satelit.
Dalam kalimat ini juga terdapat jumlah satelit yang digunakan dalam
solusi saat ini dan DoP (Dilution of Precision/Dilusi Keakuratan) yaitu
indikasi efek geometri satelit terhadap keakuratan pemosisian. DoP tidak
memiliki satuan pengukuran – namun semakin kecil nilainya semakin baik.
Format kalimat GSA adalah:
$GPGSA,A,B,x1,x2,x3,x4,x5,x6,x6,x8,x9,x10,x11,x12,x,y,z*h
h
Di mana
GSA : DoP dan satelit aktif
A : Mode pemosisian
M = Manual (di mana alat penerima dipaksa untuk bekerja pada 2 dimensi
atau 3 dimensi)
A = Automatic (otomatis)
3 : Mode pemosisian
1 = Pemosisian tidak dimungkinkan
2 = 2 dimensi
3 = 3 dimensi
x1-x12 : ID dari masing-masing satelit (SV) yang digunakan untuk pemosisian
|
|
21
x : Dilusi keakuratan posisi
y : Dilusi keakuratan horizontal
z : Dilusi keakuratan vertikal
*hh : Checksum
7. GSV (Satellites in View Data)
Kalimat NMEA ini adalah yang paling informatif dimana
menunjukkan data tentang satelit bahwa satelit tersebut mungkin mampu
mencari berdasarkan viewing mask dan almanac data. GSV juga menunjukkan
kemampuan unit saat ini untuk menjejaki data ini. Sebuah kalimat GSV dapat
menyediakan data hingga empat buah satelit, sehingga mungkin diperlukan
tiga buah kalimat GSV untuk memperoleh informasi lengkap. Untuk semua
kalimat satelit GSV tidak perlu tampil secara berurutan. Pada GSV juga
terdapat informasi SNR (Signal-to-Noise Ratio) yang merupakan indikator
kekuatan sinyal. Menurut standar NMEA, range SNR adalah 0 sampai 99 dB,
jangkauan yang biasa bekerja pada GPS adalah 25-35 dB. Format kalimat
GSV adalah:
$GPGSV,A,B,C,D1,E1,Az1,SNR1,D2,E2,Az2,SNR2,D3,E3,Az3,SNR3
,D4,E4,Az4,SNR4*hh
Di mana
GSV : Satelite in View
A : Jumlah kalimat yang dibutuhkan untuk menampung data semua SV yang
sedang dilihat
|
|
22
B : Nomor kalimat
C : Jumlah total satelit yang dilihat
D1-D4 : Nomor PRN (Pseudo Random Number) satelit
E1-E4 : Sudut elevasi (dalam derajat, nilai maksimumnya 90)
Az1-Az4 : Sudut azimuth (dalam derajat dari utara, nilainya 000 sampai 359)
SNR1-SNR4 : Nilai SNR (Signal-to Noise Ratio), semakin besar nilainya
semakin baik sinyalnya
*hh : Checksum
(Kathie Kingsley-Hughes, Hacking GPS, 2005, p199-p202)
Sistem Koordinat GPS
1. Macam Penulisan Koordinat
Koordinat Geografi diukur dalam lintang dan bujur dalam
besaran derajad desimal, derajad menit desimal, atau derajad menit detik
(Winardi, Penentuan Posisi Dengan GPS Untuk Survei Terumbu Karang, p2).
Lintang diukur terhadap ekuator sebagai titik NOL (0
o
sampai 90
o
positif
kearah utara dan 0
o
sampai 90
o
kearah selatan). Bujur diukur berdasarkan titik
NOL di greenwich (0
o
sampai 180
o
kearah timur dan 0
o
sampai 180
o
kearah
barat.
Format koordinat di bawah ini dapat dipakai dan memiliki makna yang
senada:
40:26:46N,79:56:55W
|
|
23
40:26:46.302N 79:56:55.903W
40°26
'47?N 79°58'36?W
40d 26
' 47? N 79d 58' 36? W
40.446195N 79.948862W
40.446195, -79.948862
40° 26.7717, -79° 56.93172
Dari berbagai format penulisan koordinat, ada tiga macam format koordinat
yang dipakai pada GPS sebagai titik penentu lokasi suatu area, yakni:
1. Koordinat yang mengandung derajat (degree), menit (minutes), dan detik
(seconds), disebut juga DMS.
Format: derajat menit detik koma detik (dd mm ss.ss)
Contoh: 40:26:46.302N 79:56:55.903W
Arti:
Pada Lintang Utara (Latitude North) 40 derajat 26 menit 46,302 detik
Pada Bujur Barat (Longitude West) 79 derajat 56 menit 55,903 detik
2. Koordinat yang mengandung derajat (degree) dan menit (minutes), disebut
juga MinDec.
Format: derajat menit koma menit (dd mm.mmmm)
Contoh: 76° 77.4564, -54° 34.5657
Ketentuan:
Pada kasus dimana tidak ada keterangan lintang dan bujur, maka:
|
|
24
1. Kumpulan karakter pertama adalah LINTANG (Latitude),
sedangkan di belakangnya adalah BUJUR (Longitude)
2. Pada Latitude, tanda ”-” menyatakan Selatan/South, dan pada
Longitude tanda “-“ mewakili Barat / West
Jadi format pada contoh diatas berarti:
Pada Lintang Utara 76 derajat 77,4564 menit
Pada Bujur Barat 54 derajat 34,5657 menit
3. Koordinat yang mengandung derajat saja (DegDec)
Format: derajat koma derajat (dd.dddddd)
Contoh: -06.257508 , 106.745980
Arti:
Pada Lintang Selatan 6, 257508 derajat
Pada Bujur Timur 106,745980 derajat
|
|
25
2. Konversi Koordinat
DMS – DegDec
Contoh kasus: W87°43
'41?
1. Hitung total detiknya
43
'41? = 43 menit 41 detik = (43*60 + 41) detik = 2621
detik
2. Bagian di belakang koma (bagian pecahan) adalah total detik dibagi 3600
2621 / 3600 = ~0.728056
3. Tambahkan bagian pecahan ke bagian derajat utuh
87+0.728056 = 87.728056
4. Karena arah koordinat adalah barat, maka beri tanda negatif di depan
5. Hasil akhirnya adalah -87.728056
MinDec – DegDec
Contoh kasus: 79°56.93172W
1. Angka derajat tidak berubah (79)
2. Derajat desimal dari DegDec adalah desimal menit dibagi 60
56.93172 / 60 = 0.948862
3. Jumlahkan angka bulat derajat dengan desimal derajat
79+0.948862 = 79.948862
4. Karena arah barat (west) maka diberi tanda negatif di depan
Hasil akhir = -79.948862
DegDec – DMS
|
|
26
Contoh kasus: -06.745980
1. Hilangkan tanda minus dan pecahan, ambil angka bulat sebagai
derajat.
-06.745980 menjadi 06 saja (6 derajat)
2. Kalikan angka pecahan dengan 60 dan ambil angka bulatnya sebagai menit
0.745980*60 = 44.7588 menjadi 44 saja (44 menit)
3. Kalikan sisa pecahan yang didapat dengan 60 untuk memperoleh hasil detik
0.7588*60 = 45.528 = ~45 menjadi 45 saja (45 detik)
4. Beri tanda sesuai arah dan tipe koordinat (lintang atau bujur, - atau +)
Di soal tertera “-“ maka pilihan ada 2 yaitu selatan (S) atau barat (W)
maka jawaban yang mungkin adalah S06°44
'45? atau W06°44'45?
Great Circle Distance
Menurut R.W. Sinnott ("Virtues of the Haversine", Sky and Telescope,
vol. 68, no. 2, 1984, p.159), Great circle distance adalah jarak terpendek
antara kedua titik pada permukaan sphere yang dihitung sepanjang atas
permukaan sphere. Karena permukaan bumi hampir berbentuk mendekati
sphere, maka persamaan rumus dari great circle distance sangat penting untuk
aplikasi navigasi.
Ada beberapa metode yang bisa digunakan untuk menghitung greatest
distance antara 2 titik di bumi diantaranya:
1. Rumus Haversine
|
|
27
yaitu rumus yang digunakan untuk menghitung jarak antara dua titik dengan
mengabaikan bukit.
Rumus Haversine:
R = radius bumi (radius = 6,371km)
c = jarak angular
a = ¼ dari ½ jarak seluruhnya antara 2 titik
?lat = lat2
- lat1
?long = long2
- long1
a = sin²(?lat/2) + cos(lat1).cos(lat2).sin²(?long/2)
c = 2.atan2(
va, v(1
-a))
d = R.c
2. Rumus Vincenty
Rumus ini ditemukan oleh Thaddeus Vincenty, yang menghitung
jarak antara 2 titik di bumi dengan menggunakan model ellipsoidal dari bumi
yang akurat.
Rumus Vincenty memiliki tingkat keakuratan sampai 0.5 mm dengan
model ellipsoid yang digunakan. Model ellipsoid yang biasa digunakan adalah
model ellipsoid bernama WGS-84 yang umum digunakan secara global.
Dengan nilai:
a, b = axis mayor dan minor dari ellipsoid
a = 6,378,137 m (±2 m)
b = 6,356,752.314245 m
|
|
28
f = 1 / 298.257223563
f = perataan (a-b)/a
Rumus persamaan yang digunakan adalah sebagai berikut:
f1, f2 = perhitungan garis bujur
L = selisih garis lintang
U1 = atan((1
-
f).tanf1) (U adalah ‘latitude yang disederhanakan’)
U2 = atan((1
-
f).tanf2)
? = L(persamaan pertama)
Pada akhir persamaaan diatas,nilai dari ? akan diiterasikan sampai
mencapai kondisi nilai dari ? = 0.06 mm.
Awal iterasi:
sins = v[ (cosU2.sin?)² + (cosU1.sinU2
- sin
U1.cosU2.cos?)² ]
coss = sinU1.sinU2 + cosU1.cosU2.cos?
s = atan2(sins, coss)
sina = cosU1.cosU2.sin? / sins
cos²a=1
-sin
²a
(trig identity; §6)cos2sm = cos s
-
2.sinU1.sinU2/cos²a
C = f/16.cos²a.[4+f.(4
-3.cos
²a)]
?'=L + (1
-
C).f.sina.{s+C.sins.[cos2sm+C.coss.(
-1+2.cos
²2sm)]}
Akhir iterasi
u² = cos²a.(a²
-
b²)/b²
A = 1+u²/16384.{4096+u².[
-768+
u².(320
-175.
u²)]}
B = u²/1024.{256+u².[
-128+
u².(74
-47.
u²)]}
|
 29
?s= B.sins.{cos2sm+B/4.[coss.(
-1+2.cos
²2sm)
-
B/6.cos2sm.(
-3+4.sin
²s).(
-3+4.cos
²2sm)]}
s = b.A.(s
-
?s)
a1 = atan2(cosU2.sin?, cosU1.sinU2
- sin
U1.cosU2.cos?)
a2 = atan2(cosU1.sin?,
-sin
U1.cosU2 + cosU1.sinU2.cos?)
Java-Eclipse
Menurut Meera Ghumalia (2010, p9) Eclipse adalah sebuah IDE (Integrated
Development Environment) untuk mengembangkan perangkat lunak dan dapat
dijalankan di semua platform (platform-independent).
Sifat-sifat dari Eclipse :
•
Multi-platform: Target sistem operasi Eclipse adalah Microsoft Windows, Linux,
Solaris, AIX, HP-UX dan Mac OS X.
|
|
30
•
Multi-language: Eclipse dikembangkan dengan bahasa pemrograman Java, akan
tetapi Eclipse mendukung pengembangan aplikasi berbasis bahasa pemrograman
lainnya, seperti C/C++, Cobol, Python, Perl, PHP, dan lain sebagainya.
•
Multi-role: Selain sebagai IDE untuk pengembangan aplikasi, Eclipse pun bisa
digunakan untuk aktivitas dalam siklus pengembangan perangkat lunak, seperti
dokumentasi, test perangkat lunak, pengembangan web, dan lain sebagainya.
Eclipse pada saat ini merupakan salah satu IDE favorit dikarenakan gratis dan
open source, yang berarti setiap orang boleh melihat kode pemrograman perangkat
lunak ini. Selain itu, kelebihan dari Eclipse yang membuatnya populer adalah
kemampuannya untuk dapat dikembangkan oleh pengguna dengan komponen yang
dinamakan plug-in.
|
 31
Google Maps
adalah sebuah jasa peta globe virtual gratis dan online
disediakan oleh Google. Google Maps dapat dipakai di sistem Android dengan 2
metode:
User mengakses melalui browser di
Aplikasi akses melalui Google Maps API. (Edy Winarno ST, M. Eng,
Ali Zaki, & SmitDev Community, Hacking & Programming dengan
Android SDK untuk Advanced, p213)
Google Maps API (Application Programming Interface)
Google Maps
API merupakan aplikasi interface yang dapat diakses
lewat javascript agar Google Map dapat ditampilkan pada halaman web atau
aplikasi mobile. Untuk dapat mengakses Google Map, user harus melakukan
pendaftaran API Key
terlebih dahulu dengan data pendaftaran berupa nama
domain web
atau aplikasi yang akan dibuat di
|
 32
Menurut Amri Shodiq (Tutorial Dasar Pemrograman Google Maps
API, p2), versi terakhir (latest) dari Google API (versi 3) tampil lebih cepat
dari versi sebelumnya, terutama untuk browser ponsel. Hal ini makin
memudahkan user
untuk membuat aplikasi pada perangkat mobile
semisal
Android smartphone.
Android
Sejarah Android
Menurut Hermawan (2011, p2-4), Android merupakan sistem operasi
yang dikembangkan untuk perangkat mobile berbasis Linux. Pada awalnya
sistem operasi ini dikembangkan oleh Android, Inc. yang kemudian dibeli oleh
Google pada tahun 2005.
Berikut ini adalah sistem operasi Android yang telah dirilis:
|
|
33
1.
Android versi 1.1
Pada 9 maret 2009, Google merilis Android versi 1.1. Versi ini
dilengkapi dengan pembaruan pada aplikasi, jam alarm, voice search,
pengiriman pesan melalui Gmail dan pemberitahuan e-mail.
2.
Android versi 1.5 (Cupcake)
Terdapat beberapa pembaruan, termasuk juga penambahan fitur dalam
versi ini, yaitu kemampuan merekam dan menonton video dengan modus
kamera, dukungan Bluetooth A2DP, kemampuan terhubung secara
otomatis ke headset
Bluetooth, animasi layar, dan keyboard pada layar
yang dapat disesuaikan dengan sistem. Dirilis pada pertengahan Mei 2009.
3.
Android versi 1.6 (Donut)
Dirilis pada September 2009 dengan menampilkan proses pencarian
yan lebih baik dibanding sebelumnya, penggunaan baterai indikator dan
kontrol applet VPN. Fitur lainnya adalah galeri yang memungkinkan
pengguna untuk memilih foto yang akan dihapus, kamera, camcorder dan
galeri yang diintegrasikan, CDMA/EVDO, VPN, Gestures
dan Text-to-
speech engine, kemampuan dial kontak dan pengadaan resolusi WVGA.
|
|
34
4.
Android versi 2.0/2.1 (Eclair)
Android versi ini diluncurkan pada 3 desember 2009. Dilakukan
perubahan, yaitu pengoptimalan hardware, perubahan User Interface (UI)
dengan browser baru dengan dukungan HTML.5, daftar kontak yang baru,
peningkatan Google Maps 3.1.2. Dukungan flash
untuk kamera 2MP,
digital zoom dan Bluetooth 2.1.
5.
Android versi 2.2 (Froyo)
Pada 20 mei 2010 kembali diluncurkan ponsel Android dengan versi
2.2 (Froyo). Perubahan yang dilakukan meliputi optimasi kecepatan,
memori, dan kinerja sistem operasi secara keseluruhan, dukungan untuk
menginstal aplikasi pada memori eksternal, dukungan Adobe Flash 10.1
serta fungsi USB tethering maupun Wi-Fi hotspot. Di versi sudah
mendukung fitur multi-touch, di mana sistem dapat menerima masukan
aksi lebih dari satu posisi pada layar.
6.
Android versi 2.3 (Gingerbread)
Pada 1 desember 2010, Google kembali meluncurkan versi terbaru dari
Android yaitu versi 2.3 (Gingerbread). Pada versi ini terdapat peningkatan
manajemen daya, kontrol melalui aplikasi, penggunaan multiple kamera,
peningkatan performa serta penambahan sensor seperti gyroscope.
7.
Android versi 3.0/3.1 (Honeycomb)
|
|
35
Versi ini berbeda dengan versi-versi sebelumnya. Versi ini dirancang
khusus untuk PC Tablet sehingga memiliki User Interface yang berbeda
dan mendukung ukuran layar yang lebih besar. Selain itu pada versi ini
memungkinkan penggunaan multiprosesor dan akselerasi perangkat keras
untuk grafis. SDK versi pertama diluncurkan Februari 2011.
8. Android versi 4.0 (ICS: Ice Cream Sandwich)
Diumumkan pada tanggal 19 Oktober 2011, membawa fitur
Honeycomb untuk smartphone dan menambahkan fitur baru, semisal
membuka kunci dengan pengenalan wajah, pengendalian paket data, dan
fasilitas transfer data secara langsung antar perangkat dengan teknologi
NFC (Near Field Communication).
9. Android versi 4.1 (JellyBean)
Pada 27 Juni 2012, Google mengumumkan peluncuran Android 4.1 ini
dalam Konferensi I/O Google (Google I/O Conference). Berbasiskan Linux
Kernel 3.1.10, JellyBean
berfokus pada update
dengan tujuan utama
meningkatkan user interface, dalam hal fungsionalitas dan performa.
Keuntungan Android
Menurut Hermawan (2011, p7-8), keuntungan dari Android adalah
terdapat SDK (Software Development Kit) beserta juga emulator yang tidak
memerlukan biaya lisensi untuk mendapatkan dan menggunakannya.
|
 36
Pengembang juga tidak memerlukan sertifikasi untuk dapat membuat,
menyebar atau pun menjual aplikasi melalui Market. Selain itu juga terdapat
pertukaran data dan komunikasi antar proses, semua aplikasi adalah sama.
Terdapat servis dari aplikasi yang berjalan di background, serta dukungan
Google Maps.
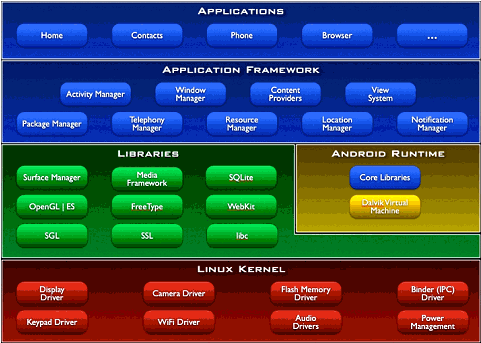
Arsitektur Android
(Zechner, 2011, p8)
Berikut ini merupakan penjelasan arsitektur Android:
|
|
37
a.
Application: lapisan ini adalah lapisan aplikasi, serangkaian aplikasi
terdapat pada perangkat mobile. Aplikasi ditulis dalam bahas
pemrograman Java.
b.
Application Framework: arsitektur ini di rancang untuk menyederhanakan
penggunaan kembali komponen. Aplikasi apapun dapat mempublikasikan
kemampuan dan aplikasi lain dapat menggunakan kemampuan
mereka
sesuai batasan keamanan.
c.
Libraries: suatu set libraries dalam bahasa pemrograman C/C++ yang
digunakan oleh komponen pada sistem Android.
d.
Android Runtime: suatu set library inti yang menyediakan sebagian besar
fungsi yang tersedia di libraries inti dari bahasa pemrograman Java. Setiap
aplikasi berjalan sebagai proses sendiri pada Dalvik Virtual Machine.
e.
Linux Kernel: Android bergantung pada Linux Kernel 2.6 untuk layanan
sistem inti seperti keamanan, manajemen memori, manajemen proses,
network stack
dan model driver. Kernel bertindak sebagai lapisan antar
hardware dengan seluruh software.
Android Framework
Menurut Mario Zechner (2011, p7) sisi Android yang berhadapan dengan
developer adalah sebuah platform yang mengabstraksi bagian pokok kernel
Linux
dan diprogram melalui Java. Dari pandangan high-level, Android
memiliki beberapa fitur yang baik :
|
|
38
a.
Sebuah application-framework yang menyediakan kumpulan API yang
kaya untuk menciptakan berbagai macam jenis aplikasi. Hal itu juga
memungkinkan penggunaan kembali dan penggantian komponen-
komponen yang disediakan oleh platform dan aplikasi pihak ketiga.
b.
Dalvik virtual machine, yang bertanggung jawab menjalankan aplikasi-
aplikasi pada Android.
c.
Sekumpulan graphic library untuk pemrograman 2D dan 3D.
d.
Media support untuk format audio, video, dan gambar umum seperti Ogg
Vorbis, MP3, MPEG-4, H.264, dan PNG.
e.
API untuk mengakses
komponen
peripheral
seperti kamera, Global
Positioning System (GPS), kompas, accelerometer, layar sentuh, trackball,
dan keyboard.
GPS Tracking System
Definisi
Sebuah unit pelacak GPS merupakan alat yang menggunakan GPS
untuk menentukan lokasi pasti dari kendaraan, orang, maupun benda lain yang
padanya terdapat alat pelacak tersebut untuk merekam posisi target dalam
interval waktu tertentu. (Bonrix Software Systems: Introduction to GPS Based
Vehicle and Person tracking System)
Data lokasi yang terekam dapat disimpan di dalam alat pelacak itu
sendiri, dapat pula dikirim ke database tertentu, atau komputer yang terhubung
dengan internet, melalui ponsel (GPRS), radio, maupun modem satelit yang
terdapat padanya. Hal ini memungkinkan lokasi target ditampilkan ke sistem
|
 39
peta baik secara realtime
maupun untuk analisa di lain waktu, melalui
perangkat lunak yang telah disediakan.
GPS Tracker
Sebuah unit pelacak GPS atau GPS tracker
merupakan alat yang
menggunakan GPS untuk menentukan lokasi pasti dari kendaraan, orang,
maupun benda lain yang padanya terdapat alat pelacak tersebut untuk
merekam posisi target dalam interval waktu tertentu.
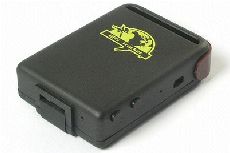
Personal Tracker
Tidak ada pembatasan penggunaanya, namun personal tracker
lebih cocok digunakan sebagai alat tracking bagi orang atau binatang
kesayangan karena alat ini berukuran mini ringan bahkan ada yang
dipasang sebagai mainan kunci. Tidak ada instalasi karena beroperasi
dengan sumber tenaga baterai internal, hanya dipegang atau ditaruh
|
 40
dalam tas namun tetap bisa digunakan untuk tracking kendaraan
dengan meletakannya di dalam kendaraan.
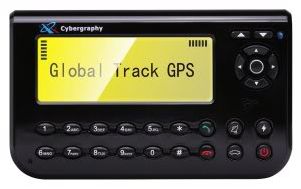
Vehicle Tracker
Jenis ini sudah dirancang untuk tracking kendaraan. Harus di
install pada kendaraan sesuai spesifikasi GPS tracker yang digunakan.
Instalasi dibuat tertutup atau tersembunyi agar tidak diketahui atau
tidak mudah dilumpuhkan sistemnya oleh pencuri atau pihak yang
tidak berwenang (hidden installation). Beroperasi dengan
menggunakan sumber arus dari aki kendaraan. Baterai internal hanya
sebagai backup
bila catu daya dilepas. Bisa di integrasikan dengan
sistem kendaraan seperti starter dan central lock. Untuk tipe tertentu
dilengkapi dengan pressure sensor
untuk dipasang dibawah jok supir.
Dengan fitur ini alat akan mengetahui ada atau tidaknya orang yang
|
 41
duduk di jok supir. Masih banyak lagi fitur lain untuk mendukung
kebutuhan melacak dan mengamankan kendaraan.
Fleet Management GPS Tracker
Fleet management GPS
Tracker adalah Vehicle GPS Tracker
yang diinterintegrasikan dengan management system
beberapa
kendaran seperti taksi atau armada angkutan dengan unit kendaraan
yang banyak dan beroperasi sekaligus dibawah satu manajemen Alat
ini dipasang dengan sistem open installation.
Harga sangat tergantung pada tipe dan merek, mulai dari $30
bahkan sampai $200. Untuk merek tertentu dapat dikenakan biaya
bulanan untuk layanan server, namun tersedia GPS tracker
bebas
abonemen sehingga user
hanya tinggal
mengaktifkan kartu SIM di
|
 42
GPS tracker dan menjaga agar tetap dalam masa aktif dan tersedia
pulsa yang cukup untuk mengirim informasi berupa SMS dan GPRS ke
HP atau ke laptop/pc/smartphone untuk keperluan pelacakan.
GPS
tracker
dengan budget rendah ($30) memiliki kekurang
akuratan pada sistem pemposisiannya. Hal ini dikarenakan
keterbatasan hardware
pada GPS tracker
itu sendiri yang memang
disesain secara low-cost. Untuk memperoleh akurasi tinggi dalam
pengambilan informasi posisi dapat menggunakan Kalman Filter
sebagai salah satu upaya.
Kalman Filter
Kalman Filter, yang juga dikenal sebagai Linear Quadratic Estimation
(LQE), merupakan sebuah algoritma filter yang cukup terkenal dan dipakai di
banyak bidang, termasuk navigasi. Kalman Filter bekerja dengan
mengestimasi state dari output / sensor plant yang kotor oleh noise
dengan
cara meminimalisasi mean kuadrat eror.
(Prediksi Curah Hujan Bulanan
Menggunakan Metode Kalman Filter dengan Prediktor SST NINO 3.4
Diprediksi, Puslitbang BMKG, p107)
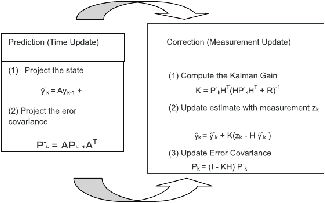
Secara teori Kalman Filter mempunyai dua tahapan yang berbeda yaitu
Predict
dan
Update. Tahapan
pertama yaitu
|
|
43
Predict menggunakan estimasi state
dari tahap waktu sebelumnya untuk
menghasilkan estimasi state pada tahap waktu sekarang, namun tidak termasuk
informasi dari observasi di dalamnya. Pada tahapan Update, prediksi
sebelumnya dikombinasikan dengan informasi observasinya untuk
penghalusan tahapan estimasi, perbaikan estimasi yang dihasilkan disebut
sebagai estimasi “posteriori”.
Sebuah GPS Tracker
yang telah disertai Kalman Filter akan dapat
memberi informasi suatu titik posisi dengan akurat. Namun penulis tidak
menitikberatkan penelitian pada filter ini, karena tujuan penulis lebih berfokus
kepada sistem pelacak dengan tracker yang memiliki budget rendah.
|
 44
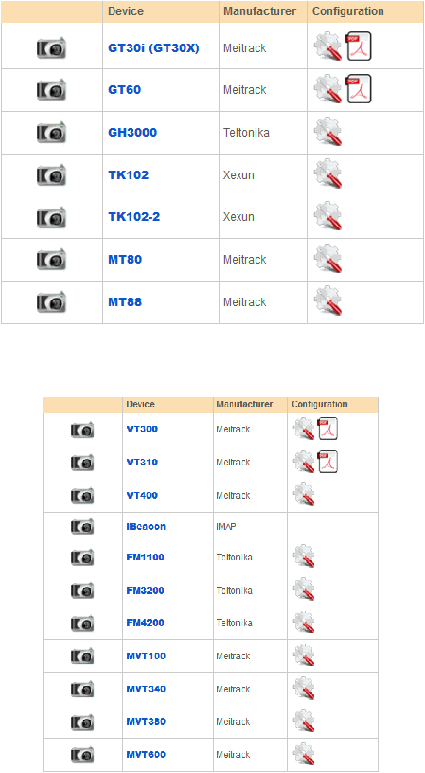
Analisa Aplikasi Sejenis
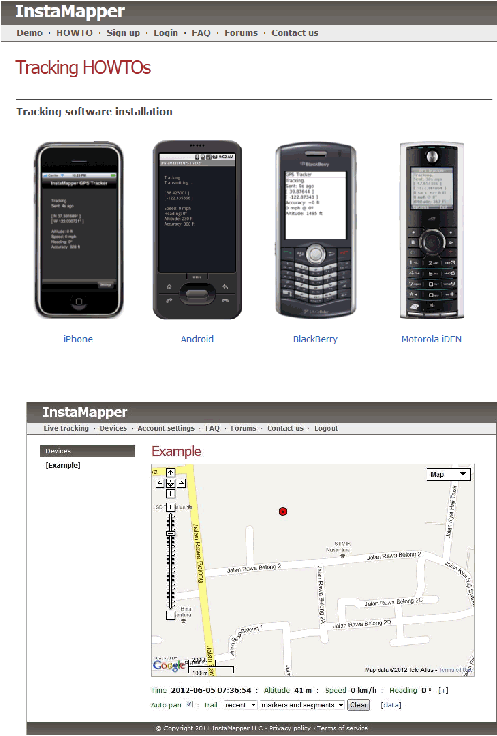
InstaMapper GPS Tracking
GPS tracker yang beralamat di http://www.instamapper.com ini
merupakan tracker yang memiliki dua mode pantau pelacakan, yaitu melalui
web (seperti terlihat di atas) dan melalui perangkat smartphone (Blackberry,
iPhone, dan Android).
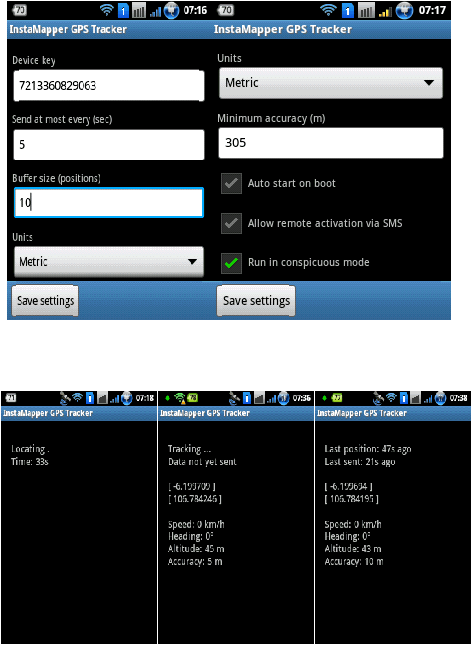
Cara pengaksesan nya meliputi:
1. Daftar akun baru lalu verifikasi dengan email
2. Login web
3. Penginstalan pada mobile device (dalam hal ini Android)
4. Kalibrasi GPS pada mobile device
|
 45
|
 46
|
 47
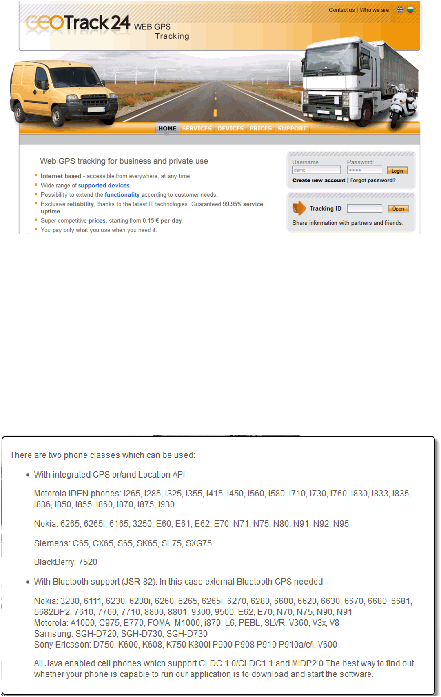
GeoTrack24
Beralamat di http://www.geotrack24.com/ , GeoTrack24 menggunakan
sambungan
pada ponsel, GPS portable tracker device dan GPS pada
kendaraan sebagai sarana pelacakan.
|
 48
|
 49
AndroidLost
Aplikasi ini khusus dibuat untuk Android dan memanfaatkan fungsi-
fungsi yang terdapat di dalamnya. Beberapa fitur yang tersedia antara lain:
1. Membaca SMS
Memungkinkan untuk membaca SMS yang ada pada Android dan
mengirimkan ke email pemilik.
2. Kendali Alarm
Memungkinkan untuk mengaktifkan alarm sirene yang dikendalikan
dari kontrol web AndroidLost.
3. Melihat posisi di peta
Memungkinkan pemilik untuk melacak posisi Androidnya. Walaupun
berada dalam gedung, akan terkirim lokasi jaringan (network) terdekat.
4. Mengirim SMS dari komputer
Memungkinkan pemilik untuk mengirim SMS dari Android dengan
mengetik pesan lewat komputer (web AndroidLost)
|
 50
5. Mengunci Android
Memungkinkan pemilik untuk mengunci Android melalui komputer.
6. Menghapus Data
Memungkinkan pemilik untuk menghapus data semisal daftar kontak
dan SMS untuk mencegah penyalahgunaan informasi.
|
  51
InstaMapper
GeoTrack24
AndroidLost
Membutuhkan web
ya
ya
ya
Interface pada device
ya
tidak
tidak
Variasi tracker
sedikit
banyak
hanya android
Fungsi lain
hanya track
hanya track
banyak
Kemampuan remote
sulit
sulit
mudah
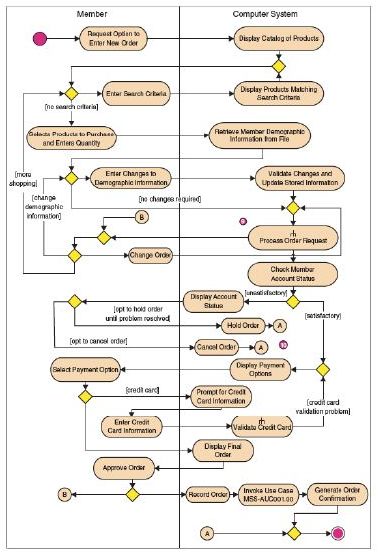
Activity Diagram
Diagram Aktivitas
Menurut Bennett, McRobb, dan Farmer (2006, p113-114), diagram aktivitas
dapat digunakan untuk memodelkan aspek yang berbeda dari sistem. Diagram
aktivitas dapat digunakan untuk merepresentasikan fungsi dari sebuah sistem dalam
bentuk sebuah Use Case. Memungkinkan juga untuk menggunakan alur objek untuk
menampilkan objek mana yang terlibat di dalam sebuah Use Case.
Secara singkat, diagram aktivitas digunakan untuk tujuan, sebagai berikut:
|
|
52
a.
Untuk memodelkan suatu proses atau tugas (dalam pemodelan bisnis).
b.
Untuk mendeskripsikan fungsi sistem yang direpresentasikan oleh Use Case.
c.
Pada spesifikasi operasi, untuk mendeskripsikan logika dari suatu operasi.
d.
Memodelkan aktivitas yang membentuk suatu siklus kehidupan.
Diagram aktivitas pada dasarnya adalah flowchart dalam konteks object-
oriented. Diagram aktivitas sangat berguna dalam pemodelan aktivitas bisnis di
tahapan awal suatu proyek. Untuk pemodelan, Interaction Sequence Diagram adalah
pemodelan yang paling mendekati sifat object-oriented. Namun pada saat
peneliti/perancang belum mau mengidentifikasi objek dan kelas yang terlibat dalam
pemodelan, maka diagram aktivitas adalah pemodelan yang tepat.
Activity Diagram
Menggambarkan aliran akitivitas. Diagram ini digunakan untuk memodelkan
aksi yang akan dilakukan saat sebuah operasi dieksekusi dan memodelkan hasil dari
aksi tersebut.
|
 53
(Whitten, 2007, p393)
Berikut ini merupakan notasi dari Activity Diagram:
1. Initial node: menunjukan permulaan dari progres, dilambangkan
dengan sebuah lingkaran solid.
|
|
54
2. Actions: dilambangkan dengan sebuah
kotak dengan ujung
membulat merepresentasikan setiap langkah individual.
Urutan dari aksi membentuk keseluruhan dari aktivitas yang
ditunjukkan oleh diagram.
3. Flow: dilambangkan dengan panah yang mengindikasikan progres
melalui actions. Setiap panah tidak
diperlukan kata untuk
mengidentifikasikannya kecuali untuk menentukan pilhan.
4. Decision: dilambangkan dengan lambang wajik. Terdapat satu
panah yang masuk dan terdapat 2 atau lebih panah yang keluar dari
pilihan wajik. Setiap panah terdapat keterangan yang
menerangkan
kondisi.
5. Merge: dilambangkan dengan lambang wajik, terdapat 2 atau lebih
panah yang masuk namun hanya satu panah yang keluar.
6. Fork: dilambangkan dengan kotak garis warna hitam, dimana hanya
satu panah yang masuk, namun terdapat dua atau lebih panah yang
keluar.
7. Join:
dilambangkan dengan kotak garis warna hitam seperti fork,
namun terdapat dua atau lebih panah yang masuk dan satu panah
yang keluar.
8. Activity final:
menunjukkan akhiran dari suat progress,
dilambangkan dengan suatu lingkaran solid dilingkari oleh lingkaran
kosong.
|