|
BAB 2
KAJIAN PUSTAKA
2.1.
Teori Umum
Teori umum merupakan teori pokok yang dijadikan landasan teori-teori lainnya.
2.1.1
Kanker Payudara
Kanker payudara
merupakan
sebuah
tumor ganas yang
berkembang
dari
sel-sel
di dalam payudara. Ciri paling umum dari kanker payudara adalah munculnya gumpalan
baru di sekitar payudara. Ciri fisik lainya yaitu adanya pembengkakan di sekitar bagian
payudara, iritasi kulit, rasa sakit di bagian puting susu, kemerahan pada bagian payudara
ataupun puting susu, serta keluarnya air susu dari payudara secara tiba-tiba.
Pendeteksian dini dari tumor
ganas
ini, akan jauh
lebih baik sebelum gejalanya
muncul. Hal ini sangat penting karena kanker dapat
menyebar dengan cepat jika tidak
diobati dari stadium paling awal.
2.1.1.1 Tipe Kanker Payudara
Kanker payudara dapat dibagi menjadi 2 tipe, yaitu :
1.
Kanker payudara non invasive
Yaitu kanker yang terjadi pada kantung susu (penghubung antara alveolus
dengan puting payudara.
Dalam bahasa kedokteran disebut ductal carcinoma in
situ (DCIS), yang mana kanker belum menyebar ke bagian luar jaringan kantung
susu.
7
|
|
8
2.
Kanker payudara invasive
Yaitu
kanker
yang
telah
menyebar keluar
bagian
kantung
susu
dan
menyerang
jaringan
sekitarnya
bahkan
dapat
menyebabkan penyebaran
(metastase) ke
bagian
tubuh
lainnya seperti kelenjar
limpa
melalui
peredaran
darah.
2.1.1.2 Pencegahan
Sampai saat ini, belum ada solusi yang tepat untuk mencegah kanker payudara.
Namun sangat mungkin bagi para wanita untuk menurunkan resiko terkena penyakit ini.
Faktor
pola
hidup,
seperti
mengurangi konsumsi
alkohol,
menyusui,
terlibat
dalam
aktifitas fisik, dan
menjaga berat badan akan sangat menurunkan tingkat resiko terkena
kanker payudara.
Penelitian juga membuktikan bahwa usia, sejarah kesehatan keluarga serta faktor
reproduksi mempengaruhi tingkat resiko untuk terkena penyakit ini. Karena sampai saat
ini
masih belum diketahui
cara untuk
mencegah kanker payudara, maka tindakan
yang
terbaik
bagi para wanita
adalah
mengambil
inisiatif
untuk melakukan
pendeteksian
sedari dini.
2.1.1.3 Pendeteksian
Semakin cepat kanker payudara ditemukan,
maka akan semakin
besar peluang
untuk
sembuh.
Sebuah
citra
yang
bernama
mammogram,
sering
digunakan untuk
mengidentifikasi keanehan
atau
keabnormalitasan dari
payudara
yang
mungkin
telah
menjadi kanker sebelum gejala fisiknya ditemukan.
|
|
9
Bagaimanapun beberapa kanker yang tak tampak pada mammogram, masih bisa
dirasakan oleh para wanita ataupun penyedia jasa kesehatan. Untuk alasan ini, American
Cancer Society merekomendasikan untuk mengikuti petunjuk untuk menemukan kanker
payudara lebih awal, antara lain:
•
Wanita
yang
berumur
40 tahun
atau
lebih
tua harus melakukan
mammography setiap tahun dan harus terus melakukannya selama mereka
berada dalam kondisi yang sehat.
•
Wanita
berumur
antara
20
sampai
30
tahun
harus
menjalankan Clinical
Breast Exam (CBE)
oleh
para
profesional paling
sedikit
3
tahun
sekali.
Setelah berumur 40, maka CBE harus dilakukan setiap tahun.
Para wanita harus mengetahui bagaimana payudara mereka biasanya terlihat dan
terasa,
serta
melaporkan setiap perubahan yang terjadi kepada penyedia jasa kesehatan
yang mereka percayai. Breast self-examination (BSE) adalah sebuah cara bagian wanita
untuk memulai pendeteksian di usia mereka yang menginjak 20 tahun.
Screening
MRI direkomendasikan untuk
wanita dengan resiko terjangkit kanker
payudara sekitar
20%
sampai
25%,
termasuk
wanita
dengan
sejarah
keluarga
yang
menderita kanker
payudara
maupun
kanker
rahim
dan
wanita
yang
diobati
karena
penyakit Hodgkin.
2.1.1.4 Pengobatan
Kanker payudara yang belum parah dapat disembuhkan. Pengobatan yang paling
sukses adalah ketika kanker payudara dideteksi lebih awal, sebelum menyebar ke
kelenjar getah bening. Tergantung dari situasi dan pilihan pasien, pengobatan mungkin
|
|
10
bisa sampai ke tahap breast conservation surgery (pengangkatan tumor serta jaringan di
sekelilingnya) ataupun mastectomy (operasi
untuk
menghilangkan payudara).
Di kedua
kasus ini, kelenjar getah bening di bawah lengan tentu saja turut dihancurkan.
Pengobatan lainnya
yaitu
radiasi,
terapi,
kemoterapi,
terapi
hormon
dan
monoclonan
antibody
therapy.
Seringkali dua
atau
lebih
metode
tersebut
dikombinasikan. Para pasien tentunya harus mendiskusikan tipe pengobatan ini terhadap
dokter mereka.
2.1.2 Mammography
Mammography merupakan tipe spesifik dari pencitraan yang menggunakan
sistem
X-Ray
berdosis
rendah
untuk
memeriksa
payudara.
Bahkan kebanyakan
dokter
percaya
bahwa
mammography mengurangi
tingkat
kematian
akibat
dari
kanker
payudara. Pemeriksaan
menggunakan
mammography
menghasilkan
citra
yang disebut
dengan
citra
mammogram, yang
digunakan
untuk
pendeteksian awal
dan
untuk
mendiagnosis penyakit payudara pada wanita.
2.1.2.1 Conventional Mammogram
Conventional
mammogram
atau
biasa
disebut juga
X-Ray
Mammography,
seringkali digunakan dalam praktek klinis untuk tujuan diagnosis serta screening.
Bahkan screening
mammography
telah
menjadi metode
paling
efektif yang
direkomendasikan untuk pendeteksian kanker payudara sedari dini.
Mammogram
mempunyai tingkat
sensitivitas
yang
tinggi
dalam
mengetahui
lemak payudara dan demonstrasi
yang luar biasa dalam microcalcification. Walaupun
|
 11
begitu, mammogram sendiri memiliki batasan. Mammogram memiliki kemampuan yang
rendah dalam
mendeteksi
tingkat
kepadatan dari
payudara
wanita
remaja atau
wanita
yang baru
saja
mengalami
operasi
di
bagian
payudaranya
karena
kelenjar
dan
jaringannya dideteksi
sebagai
abnormalitas. Lebih
lanjut,
mammogram
ini
hanya
mengeluarkan radiasi X-Ray berdosis rendah saat pemeriksaan.
Mammogram
konvensional
ini
mengeluarkan
hasil
dari
screening-nya
berupa
film yang dapat dilihat secara kasat mata oleh dokter. Namun karena
metode ini sering
kali
menghasilkan kesalahan
akibat
human
error,
maka
kemudian
muncullah
mammogram dijital.
Gambar 2.1.2.1. Convensional Mammogram
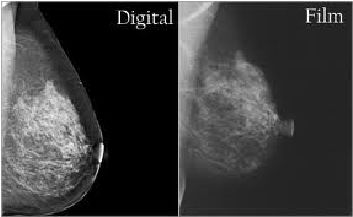
2.1.2.2 Mammogram dijital
Sebuah
mammogram
dijital
tercipta
ketika
mammogram
biasa
didijitalisasikan
sehingga dapat digunakan oleh komputer. Dijitalisasi dapat didapatkan dari penggunaan
|
 12
specific
mammogram
digitizer
atau
pun
dari
sebuah
kamera
yang
memiliki
resolusi
tinggi
yang diperlukan
untuk
menghasilkan
high-resolution
mammogram
dijital
tanpa
kehilangan informasi dari original mammogram.
Secara spesifik, mammogram
dijital adalah sebuah sistem mammography di
mana X-Ray
film
digantikan
oleh solid-state
detector
yang
mengubah X-Ray
menjadi
sinyal
elektrik. Detektor ini
sama
serperti
yang
terdapat
pada
kamera
dijital.
Sinyal
elektrik
ini
kemudian digunakan
untuk
menghasilkan citra
dari
payudara
yang
dapat
dilihat
pada
layar
komputer atau
dicetak
pada
film
khusus
yang
sama
seperti
pada
konvensional mammogram. Pada umumnya, kebanyakan mammogram dijital memiliki
4096 grays levels per pixel dari semua area yang terdapat pada mammogram image.
Gambar 2.1.2.2. Mammogram Image
2.1.2.3 Prosedur Untuk Melakukan Mammography
Selama
proses
mammography,
payudara
dikompres
menggunakan unit
mammography
yang
telah
teruji.
Masing-masing
bagian
payudara
dikompres
kurang
lebih
hanya 20-30
detik. Total waktu
yang dihabiskan untuk 1
x
pemeriksaan adalah
|
 13
sekitar
30
menit
(menurut
prosedur
pemeriksaan
menggunakan
mammography
yang
berlaku). Pada saat pengkompresian, payudara dapat terasa tidak nyaman.
Pengkompresan
ini
dilakukan
untuk
membuat
payudara
menjadi
mengembang
dan
rata
sehingga
lebih
mudah
untuk
mengambil
citra
di
dalam
jaringan
payudara.
Waktu
terbaik
untuk
melakukan
pemeriksaan adalah
1
minggu
setelah
haid
pertama
menstruasi, karena payudara dalam keadaan
lebih
lunak dan
tidak terlalu tegang (tidak
boleh dilakukan pada saat kehamilan).
Gambar 2.1.2.3. Mammogram’s Procedur
2.1.2.4 Computer-Aided Detection (CAD)
CAD
merupakan
sistem
yang
mempergunakan mammogram
image
dari
mammogram
dijital
untuk
mencari
area
abnormal
dari
kepadatan
maupun
klasifikasi
yang mungkin terindikasi adanya kanker.
CAD
melakukan pendeteksian terhadap adanya
sel kanker
yang
mungkin
terdapat
di
dalam
payudara.
Namun CAD
sendiri
memiliki keterbatasan yaitu
sering
terjadi false-positive maupun false-negative. False-positive yaitu sebuah kesalahan
|
|
14
diagnosis
di
mana
tidak
terdapat
sel
kanker,
namun
dinyatakan
terdapat
sel
kanker.
False-negative
merupakan
keadaan
sebaliknya,
yaitu sebuah
kesalahan
diagnosis
di
mana terdapat sel kanker namun tidak dapat ditemukan oleh sistem CAD.
2.2 Teori Khusus
Teori
khusus
adalah
teori
yang berhubungan dengan
topik
yang dibahas
dalam
skripsi ini.
2.2.1 Computer Vision
Computer Vision adalah ilmu
yang berhubungan dengan modelling
serta replika
dari
penglihatan
manusia
menggunakan software
dan
hardware
komputer.
Computer
Vision
mengkombinasikan pengetahuan dalam computer science, electrical engineering,
matematika, psikologi, biologi, serta cognitive science.
Computer
Vision
memerlukan pengetahuan dari
semua
field
tersebut
dengan
tujuan
untuk
mengerti
dan
mensimulasikan operasi
dari
sistem
penglihatan
manusia.
Computer
Vision
juga
dapat
diartikan
sebagai
sebuah
disiplin
ilmu
yang
mempelajari
bagaimana
membangun,
menginterprasikan, dan
mengerti tentang 3D
scene
dari citra
2D dalam sebuah struktrur scene yang ditunjukkan. Masalah yang paling sering dihadapi
dalam
Computer
Vision
adalah
banyaknya
noise
sehingga
mengganggu proses
image
processing, feature extraction, dan lainnya.
Computer vision sulit untuk diwujudkan karena format citra pada dasarnya
adalah
many
to
one
mapping.
Tugas-tugas
seperti
mengidentifikasi tanda
tangan,
mengidentifikasi tumor di dalam citra resonansi
magnetik, mengenal objek
yang
diterima dari
citra
yang
dihasilkan oleh
satelit,
mengidentifikasi
wajah,
menentukan
|
 15
lokasi sumber mineral dari sebuah citra, dan membangun citra tiga dimensi dari
potongan
citra
dua
dimensi
dipertimbangkan sebagai
lapangan
subjek
di
Computer
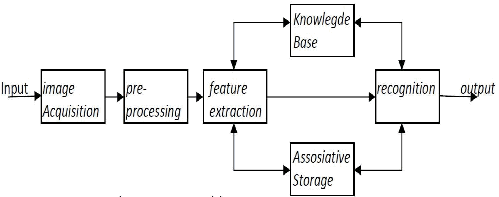
Vision. Tipe
sistem Computer
Vision terdiri dari tingkatan seperti akuisisi citra
(image
acquisition), preprocessing, ekstrasi fitur (feature extraction), menyimpan objek dengan
asosiasi, mengakses basis pengetahuan dan pengenalan.
Gambar 2.2.1 Bagan Sistem Computer Vision
2.2.1.1 Computer Vision Hierarchy
Low-level vision: process image dari ekstraksi fitur
Intermediate-level
vision:
pengenalan
objek
dan
interpretasi
3D
scene
menggunakan fitur yang didapat dari low-level vision
High-level
vision:
interpretasi dari
informasi
yang diperoleh
dari intermediate-
level
vision
dan
low-level
vision
harus
ditampilkan. Interpretasi
tersebut
mungkin
termasuk deskripsi konsepsual dari sebuah scene seperti aktivitas, intensi, dan prilaku.
|
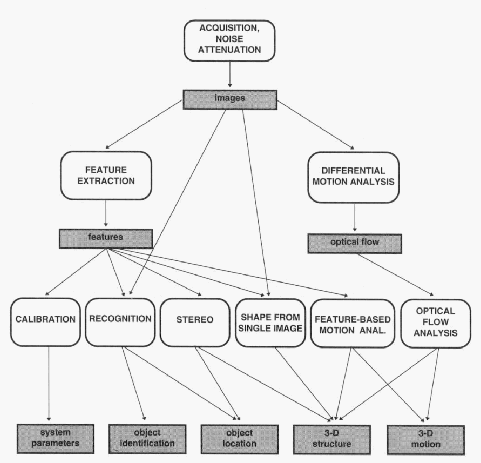 16
Gambar 2.2.1.1 Computer Vision Hierarchy
2.2.1.2 Computer Vision Fields
Computer Vision secara signifikan menghadapi field seperti :
image processing,
pattern recognition, dan photogrammetry.
Image processing berfokus pada
manipulasi image untuk meningkatkan kualitas
dari
image,
untuk
mengembalikan originalitas
dari
image
atau
untuk
mengkompres/mengdekompres size dari image.
|
|
17
Pattern recognition mempelajari berbagai teknik (seperti teknik statistika, neural
network,
support
vector
machines,
dan
lain-lain)
untuk
mengenali atau
mengklasifikasikan berbagai pola yang berbeda-beda.
Photogrammetry
berhubungan dengan
bagaimana
cara
untuk
mendapatkan
pengukuran yang akurat serta terpercaya dari
sebuah image. Photogrammetry berfokus
pada pengukuran yang akurat. Kalibrasi kamera dan
rekontruksi 3D
merupakan 2 area
yang paling diminati dalam penelitian photogrammetry maupun computer vision.
2.2.1.3 Computer Vision Applications
Contoh aplikasi dari computer vision:
•
Proses Controlling -> Industri robot
•
Navigasi -> kendaraan yang dapat berjalan sendiri
•
Deteksi Event -> penghitungan jumlah orang
•
Object Modelling ->medical image
2.2.1.4 Computer Vision Specific Task (Recognition)
Masalah
klasik
di
dalam computer
vision
yaitu
menentukan
ada
atau tidaknya
spesifik objek, fitur, maupun aktivitas dari data yang terdapat dalam citra atau video.
|
|
18
Tahap-tahapnya :
9
Pengenalan Objek
9
Identifikasi
9
Pendeteksian
•
Motion analysis
•
Scene reconstruction
•
Image restoration
•
3D volume recognition
2.2.2 Pre-Processing
Pre-processing
merupakan sebuah
proses
untuk
menghilangkan bagian-bagian
yang tidak diperlukan pada citra input untuk proses selanjutnya.
2.2.2.1 Tujuan
Tujuan dari pre-processing, antara lain:
•
Menghilangkan noise
•
Memperjelas fitur data
•
Memperbesar atau memperkecil ukuran data
•
Mengkonversi data asli agar diperoleh data yang sesuai kebutuhan
2.2.2.2 Contoh dari pre-processing
Contoh dari pre-processing adalah:
•
Noise filtering
•
Edge detection
•
Pengubahan citra RGB menjadi gray-scale
|
|
19
2.2.2.3 Tahapan
Tahap pre-processing dalam sistem pengenalan mesin dapat menangani persepsi
tingkat kecerahan
serta masalah seperti pemulihan
citra
dan
rekonstruksi citra.
Sistem
akuisisi citra dalam prakteknya tidak sempurna dan
memiliki resolusi
terbatas. Metode
restorasi citra berurusan dengan
memperkirakan citra asli dari citra yang rusak. Teknik
restorasi
mengkompensasi degradasi
sistem
citra
yang
mungkin
telah
mengalami
perubahan, dan baru-baru ini, jaringan syaraf tiruan dibangun untuk restorasi citra.
Tingkat
pre-processing
berikutnya
adalah
tingkat
menengah. Salah
satu
teknik
pengolahan terkenal tingkat menengah adalah fitur ekstraksi, yang terdiri dari pemetaan
suatu
vektor
observasi ke
ruang
fitur. Tujuan
utama dari ekstraksi
fitur adalah
untuk
mengurangi data
dengan
mengukur
fitur
tertentu yang
membedakan pola
input. Untuk
ekstraksi ciri, orang dapat memilih subset dari vektor input yang diamati, atau salah satu
dapat mengubah vektor input pengamatan menggunakan beberapa aplikasi dasar fungsi.
Di dalam
banyak ortogonal,
vektor
observasi diperoleh
dengan sampling
sebuah
citra
masukan
yang mewakili
vektor observasi yang dipetakan ke fitur domain ruang. Data
dalam
domain diubah,
kemudian
dapat
diurutkan
menurut
tingkat
signifikansi
isi
dan
kualitas pola diambil.
2.2.2.4 High Pass Filtering
High pass filtering adalah sebuah teknik untuk menajamkan gambar dijital
dengan cara
mengkonvolusikan sebuah
matriks kernel
terhadap
gambar dijital
tersebut.
Hasil
dari
proses
ini
adalah
gambar
yang
sudah
ditajamkan
kualitasnya. High
pass
filtering biasanya menghasilkan noise berupa bintik-bintik pada gambar dijital. Karena
|
|
20
hal
ini
biasanya
teknik
ini
diikuti dengan
teknik
smoothing
untuk
mengurangi
noise
tersebut.
2.2.2.5 Low Pass Filtering
Low
pass
filtering
adalah
sebuah
teknik
untuk
mengurangi tingkat
ketajaman
gambar
dijital
dengan cara
mengkonvolusikan sebuah
matriks kernel
terhadap
gambar
dijital tersebut.
Low pass
filtering biasanya dapat
menghilangkan detail-detail yang ada
pada
gambar.
Karena
itu,
teknik
harus
dipakai
dengan
secukupnya agar
detail
yang
dibutuhkan pada gambar tidak hilang
2.2.2.6 Histogram Equalization
Metode ini biasanya akan
mengangkat tingkat kontras gambar secara signifikan,
terutama apabila gambar tersebut memiliki tingkat variasi intensitas yang kecil. Metode
ini
akan
menyesuaikan sebaran
intensitas
pada
histogram
sehingga
gambar
dengan
tingkat
kontras
yang
rendah
sehingga
menjadi
gambar
dengan
tingkat
kontras
yang
tinggi.
Cara metode ini bekerja adalah dengan menyeimbangkan sebaran intensitas yang
sebelumnya terpusat pada bagian intensitas tertentu saja. Gambar seperti ini biasa
disebut
juga
sebagai
gambar
yang
mostly
dark
atau
gambar
yang
memiliki
dominasi
pixel bernilai
rendah dan juga
gambar
yang mostly bright atau
gambar yang memiliki
dominasi pixel bernilai tinggi.
Dengan
mengaplikasikan metode
ini,
maka
gambar akan
memiliki tingkat
sebaran
intensitas
yang tinggi, dan
detail
yang sebelumnya tidak
terlihat akan
menjadi
terlihat.
|
|
21
2.2.3 Feature Extraction
Feature Extraction adalah proses pengambilan ciri-ciri yang unik dari data atau
image
yang
akan
diolah.
Selama
30
tahun
terakhir ini,
banyak
teknik
yang
telah
dikembangkan untuk
ekstraksi
fitur,
contohnya Fourier
transform, moment invariants,
distribusi Wigner, Houghtransform, polymials ortogonal, fungsi gabor, dll.
Banyak
model
jaringan
neural
telah
diusulkan untuk
ekstraksi
fitur.
Masalah
pengakuan invariant
objek
sering
ditangani
pada
tahap
ekstraksi
fitur
karena,
untuk
mempertimbangkan translasi, rotasi, dan perbedaan skala pada citra, sistem pengenalan
harus
melatih
lebih
dari
sejumlah
besar
sampel
pelatihan.
Untuk
mendapatkan fitur
invariant, sifat-sifat transformasi Fourier sering digunakan.
Fitur
tekstur (texture feature)
sering digunakan untuk mengenali objek.
Tekstur
umumnya diakui sebagai dasar untuk melakukan persepsi. Banyak
metode statistik dan
struktural, serta
model
jaringan syaraf
tiruan
untuk
menganalisis tekstur
yang
tersedia.
Metode
statistik analisis tekstur didasarkan pada hubungan antara
nilai piksel abu-abu
dalam citra. Ekstraksi fitur
umumnya juga berkaitan dengan
ekstraksi
fitur tekstur. Di
dalam program yang kami buat, kami menggunakan GLCM (Gray Level Co-Occurrence
Matrix) dalam melakukan ekstraksi fitur.
2.2.3.1 Tujuan
Tujuan dari feature extraction antara lain:
•
Memperkecil jumlah data
•
Mengambil informasi yang penting dari data yang diolah
•
Mempertinggi presisi pengolahan
|
|
22
2.2.3.2 Contoh dari Feature Extraction
Berikut adalah beberapa cara ekstraksi fitur:
•
Edge enhancement
•
Separasi atau pemisahan warna
•
Pencarian nilai-nilai ekstrim (tertinggi atau terendah)
•
Penghitungan banyaknya sudut
2.2.4 ROI (Region of Interest)
ROI
atau
Region
of
Interest
adalah
bagian
yang
dipilih
sebagai daerah
yang
signifikan di dalam sebuah data yang akan diidentifikasi untuk tujuan tertentu. Konsep
ROI
biasanya
digunakan dalam
pencitraan medis,
oleh
karena
itu
di
sini
kami
menggunakan konsep ini karena kami membahas tentang masalah kanker payudara. ROI
kami pakai
untuk mendapatkan daerah yang lebih signifikan dari
gambar mammogram
sehingga fitur dapat terlihat lebih jelas dan dapat menghasilkan ekstraksi fitur yang baik.
Tentunya hal ini akan membuat hasil yang lebih efektif dan efisien dibandingkan dengan
mendeteksi keseluruhan gambar mammogram.
2.2.5 GLCM (Gray Level Co-occurrence Matrix)
GLCM adalah
matriks
yang
menjelaskan dan
mencitrakan
frekuensi
level
abu-
abu (grayscale) yang
muncul
dalam
ruang
linier
tertentu
yang
mempunyai
hubungan
dengan
level abu-abu
lainnya dalam bidang
investigasi. Di sini, co-occurrence matrix
|
 23
dihitung berdasarkan
dua
parameter,
yaitu
jarak
relatif antara
pasangan
piksel d
yang
diukur dalam angka piksel dan orientasi relatif
f
.
GLCM merupakan metode statistik untuk menghitung probabilitas co-occurance
dari fitur
tekstural. Misalkan diberikan citra dengan f(x,y) berukuran L® x L© dengan set
tingkat keabu-abuan
N
g
,
menetapkan matriks p(i,j,d,
f
)sebagai
P(i,j,d, f) = card { ((x¹
,y¹),(x²
,y2
))
? L
(L
r
x
Lc
)
x (
Lr
x
L
c
)
(x²y²) =(x¹
,
,y¹) + (d cos
0,
d sin
0)
f(x¹,y¹
)
= i, f((x²
,
y
2
)
= j,,0
=
i,j < N
g
}
dimana
d
menunjukkan
jarak antara
piksel
(x¹
,y
1
)
dan
(x
2,
y²
)
di dalam
citra
f
menunjukkan orientasi jajaran (x¹
,y¹) dan (x²,y²
), dan card
{?} menunjukkan nomor dari
elemen-elemen di dalam set.
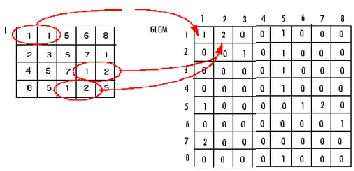
Gambar 2.2.5 Proses untuk mendapatkan matriks GLCM
Citra I
pada citra di atas diubah
menjadi matriks
GLCM,
di
mana nilai matriks
GLCM didapat dengan mengkalkulasikan jumlah setiap pasangan nilai piksel
bertetangga pada citra I dengan jarak d. Contoh di atas nilai piksel pada sudut kiri atas
bernilai 1 dan di sampingnya bernilai 1, kemudian dihitung banyaknya pasangan piksel
yang bernilai [1 1]. Dimensi matriks GLCM adalah sebesar n x n, di mana n adalah nilai
|
 24
piksel terbesar citra I. Berdasarkan contoh di atas, pasangan nilai piksel [1 1] berjumlah
1, lalu dibuat matriks GLCM pada titik (1, 1) dengan nilai 1. Demikian pula titik (1,2)
yang berasal dari jumlah pasangan [1 2] bernilai 2.
Untuk
mengembangkan deskriptor
yang
disesuaikan
dijelaskan
di
bagian
selanjutnya,
maka diperlukan
untuk menganalisis fitur dari
mamografi.Dalam studi
ini,
matriks
GLCM
dibangun
untuk
menghitung ROI
di
masing-masing
arah 0°,
45°, 90°,
dan 135°.
Fitur tekstur yang dapat diekstraksi dari gray level co-occurrence matrices antara
lain adalah angular
second
moment, contrast, correlation,
variance,
inverse difference
moment,
sum
average,
sum
variance,
sum
entropy,
entropy, different variant,
dan
different entropy.
|
|
25
2.2.6 Support Vector Machines (SVM)
Support
Vector
Machine
(SVM)
pertama
kali
diperkenalkan
oleh
Vapnik
pada
tahun 1992 sebagai rangkaian harmonis konsep-konsep unggulan dalam bidang pattern
recognition (pengenalan
pola). Sebagai
salah
satu
metode
pengenalan
pola,
usia
SVM
terbilang
masih
relatif
muda.
Walaupun
demikian,
evaluasi
kemampuannya dalam
berbagai aplikasi menempatkannya sebagai sebuah karya terbaik dalam pengenalan pola.
SVM
adalah
metode
learning
machine
yang
bekerja
atas
prinsip Structural
Risk
Minimization
(SRM) dengan
tujuan
menemukan
hyperplane
terbaik
yang
memisahkan
dua buah class pada input space.
Konsep
dasar
SVM
sebenarnya
merupakan kombinasi
harmonis dari
teori-teori
komputasi yang telah ada puluhan tahun sebelumnya, seperti margin hyperplane, kernel
diperkenalkan oleh
Aronszajn
tahun
1950
dan
demikian
juga
dengan konsep-konsep
pendukung yang
lain.
Akan
tetapi
hingga
tahun
1992,
belum
pernah
ada
upaya
merangkaikan komponen-komponen tersebut.
Berbeda
dengan
strategi
neural
network
yang
berusaha mencari hyperplane
pemisah antar kelas,
SVM
berusaha
menemukan hyperplane
yang
terbaik
pada
input
space.
Prinsip dasar
SVM
adalah
linear classifier, dan
selanjutnya dikembangkan agar
dapat bekerja pada problem non-linear,
dengan memasukkan konsep
kernel trick
pada
ruang
kerja
berdimensi
tinggi.
Perkembangan ini
memberikan
rangsangan
minat
penelitian di bidang pengenalan pola untuk investigasi potensi kemampuan SVM secara
teoritis maupun
dari segi aplikasi.
Dewasa
ini SVM telah berhasil diaplikasikan dalam
aplikasi
di
dunia
nyata
dan
secara
umum
memberikan solusi
yang
lebih
baik
dibandingkan dengan metode konvensional seperti misalnya artificial neural network.
|
|
26
Support
Vector
Machines
(SVM)
telah
terbukti
sukses
diaplikasikan dalam
menyelesaikan
masalah klasifikasi dan
estimasi
fungsi
setelah
pengenalan
yang
dilakukan oleh
Vapnik
dalam
konteks
teori
statistical
learning
dan
structure
risk
minimization.
Vapnik
mengkonstruksikan SVM
standar
untuk
memisahkan
data-data
pelatihan menjadi dua kelas.
2.2.6.1 Karakteristik SVM
Karakteristik SVM yaitu:
•
Secara prinsip SVM adalah linear classifier
•
Pattern recognition dilakukan dengan mentransformasikan data pada
input
space
ke
ruang
yang
berdimensi lebih
tinggi,
dan
optimisasi
dilakukan pada
ruang
vector
yang
baru
tersebut.
Hal
ini
membedakan
SVM
dari
solusi
pattern
recognition
pada
umumnya, yang
melakukan
optimisasi
parameter
pada
ruang
\
hasil
transformasi yang
berdimensi
lebih rendah daripada dimensi input space.
•
Menerapkan strategi Structural Risk Minimization (SRM)
•
Prinsip
kerja
SVM
pada
dasarnya
hanya
mampu
menangani
klasifikasi
dua class.
|
|
27
2.2.6.2 Kelebihan dan kekurangan SVM
Kelebihan SVM:
1. Generalisasi
Generalisasi didefinisikan sebagai kemampuan suatu
metode
untuk mengklasifikasikan
suatu pattern, yang
tidak termasuk data yang dipakai dalam
fase pembelajaran metode
tersebut.
Generalization error dipengaruhi oleh dua faktor: error terhadap training set dan
dimensi
VC
(Vapnik–Chervonenkis dimension).
Jadi, SVM
dapat
meminimalkan error
pada training-set, juga meminimalkan dimensi VC.
2. Curse of dimensionality
Curse
of
dimensionality
didefinisikan sebagai
masalah
yang
dihadapi
suatu
metode
pattern recognition dalam mengestimasikan parameter (misalnya jumlah hidden neuron
pada
neural
network,
stopping
criteria
dalam
proses
pembelajaran, dsb)
dikarenakan
jumlah sampel
data
yang
relatif
sedikit
dibandingkan dimensional
ruang
vektor data
tersebut. Semakin
tinggi
dimensi
dari ruang
vector
informasi yang
diolah,
membawa
konsekuensi dibutuhkannya jumlah data dalam proses pembelajaran.
3. Feasibility
SVM
dapat diimplementasikan
relatif
mudah,
karena
proses
penentuan support
vector
dapat dirumuskan dalam QP problem (Quadratic programming). Dengan demikian, jika
kita memiliki library
untuk
menyelesaikan QP problem, dengan sendirinya SVM dapat
diimplementasikan dengan mudah.
|
 28
Kekurangan SVM:
1.
Sulit dipakai dalam problem berskala besar.
Skala besar dalam hal ini dimaksudkan dengan jumlah sample yang diolah.
2.
SVM
secara teoritik
dikembangkan
untuk
problem
klasifikasi dengan
dua
class
atau
lebih.
Namun
demikian,
masing-masing strategi
ini
memiliki
kelemahan,
sehingga dapat
dikatakan
penelitian
dan
pengembangan
SVM
pada
multiclass-
problem masih merupakan tema penelitian yang masih terbuka.
2.2.6.3 Tujuan SVM
Tujuan
dari
pelatihan
pada
SVM
adalah
untuk
menemukan fungsi
pemisah
(classifier) f (x) = ? . x + b sehingga kita dapat
menggunakan classifier tersebut untuk
mengklasifikasi data. Training set yang digunakan :
, di mana
berperan sebagai
input dan
menjadi output,
mengindikasikan kelas.
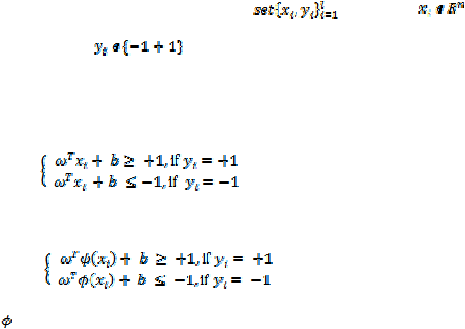
Formulasi SVM dimulai dari asumsi bahwa kasus
yang dapat dipisahkan secara
linear
adalah:
Untuk kasus yang tidak dapat dipisahkan
Dimana
menunjukkan sebuah pemetaan dari input menjadi sesuatu yang
disebut ruang fitur berdimensi tinggi. Dalam metode kernel suatu data x di input space
dipetakan ke kernel feature space yang lebih tinggi melalui map ? sebagai berikut :
|
 29
?
:
x
?
?
(x). Karena itu data x di input space, menjadi ? (x) di kernel space. Dalam
kernel space ini,
dot product dua vektor
<x,
x’>
menjadi
<?(x), ?(x)’>.
Suatu
fungsi
kernel, K(x, x’), bisa digunakan untuk menggantikan dot product <?(x), ?(x)’>. Untuk
setiap fungsi yang continuous dan positive definite, akan ada suatu pemetaan ?, sehingga
K(x,y)
=
(?(x),
?(y))
untuk
semua
x,y
dimana
adalah
input
space
(Mercer’s
Theorem).
Dalam
ruang
ini,
permukaan keputusan
linear
dibangun dengan
property
unik
yang menjamin kemampuan generalisasi yang tinggi dalam jaringan. Ditunjukkan dalam
citra
diagram
di
bawah
ini,
bahwa
fungsi
kernel
non-linear
memungkinkan untuk
menghitung hyperplane pemisah dengan margin maksimum di feature space.
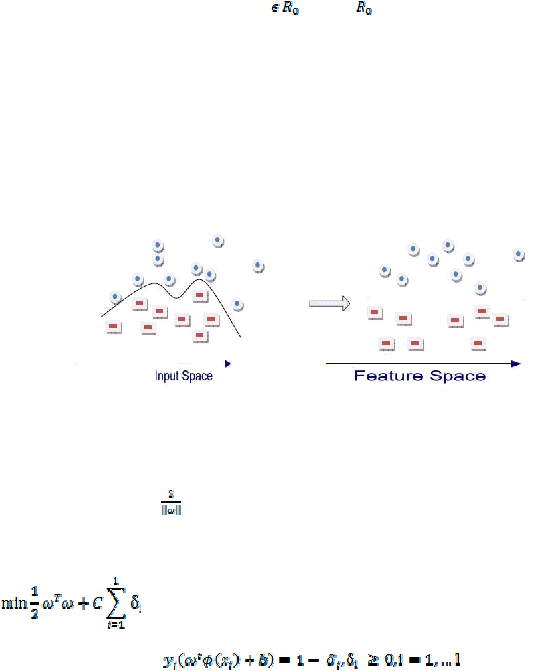
Gambar 2.2.6.3 Pemetaan ruang fitur menggunakan fungsi kernel
Kita harus
menemukan, di antara semua hyperplane
yang memisahkan data-data
sebuah jarak maksimum
di antara kedua kelas. Masalah yang ada ditransformasikan
ke dalam bentuk Quadratic Programming (QP) problem.
s.t
dimana C adalah parameter yang ditransaksikan antara error dengan margin.
|
 30
Quadratic
Programming
adalah
suatu
teknik
optimisasi yang
meminimalisasi
sejumlah
n
dalam
notasi
matriks. Masalah Quadratic
Programming
dapat
dipecahkan
dengan
menggunkan
lagrangian
multipliers
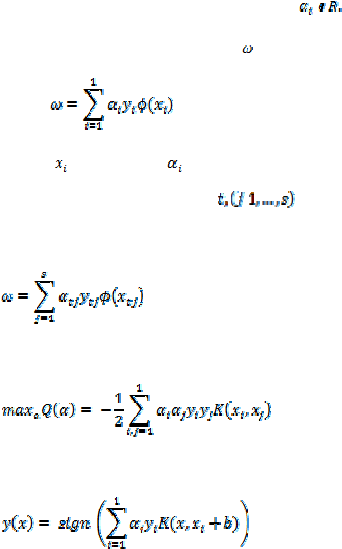
Solusi
yang
dihasilkan
memenuhi
kondisi Karush-Kuhn-Tucker (KKT). dapat dicari dengan menggunakan
Dimana bukan nol dan adalah support vector. Decision boundary hanya ditentukan
oleh
support
vector. Diketahui
menjadi
titik-titik
dari
s
support vector.
Maka kita dapat menuliskan kembali fungsi yang ada menjadi:
Masalah Quadratic Programming dipecahkan dengan menambahkan Dual Problem
Dengan kernel trick (Mercer’s Theorem)
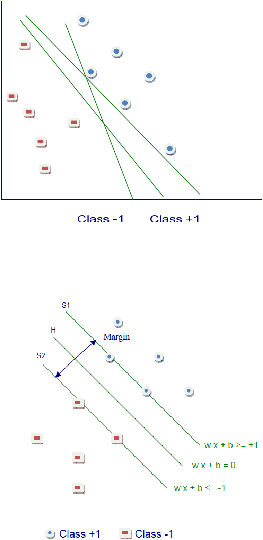
2.2.6.4 Pengenalan Pola dalam Support Vector Machines
Konsep SVM dapat dijelaskan secara sederhana sebagai usaha mencari
hyperplane
terbaik
yang
berfungsi
sebagai pemisah dua buah
kelas
pada
input
space.
Gambar
di
bawah
memperlihatkan beberapa
pola
yang
merupakan
anggota
dari
dua
buah kelas: +1 dan -1. Pola yang tergabung pada kelas -1, disimbolkan dengan warna
|
 31
biru
(lingkaran).
Masalah
klasifikasi
dapat
diterjemahkan
sebagai
usaha
menemukan
garis
(hyperplane)
yang
memisahkan antara
kedua
kelompok
tersebut.
Berbagai
alternative garis pemisah (discrimination boundaries) ditunjukkan pada gambar (a).
Gambar 2.2.6.4a Garis-garis yang merupakan discrimination boundaries
Gambar 2.2.6.4b Pemisah antar class
|
 32
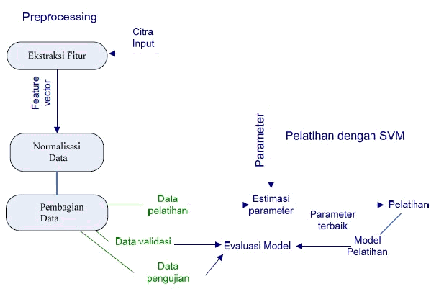
2.2.6.5 Pelatihan dengan Support Vector Machine
Penggunaan SVM baik
dalam bentuk supervised
pada
prinsipnya dipakai untuk
menyelesaikan sebuah
permasalahan
quadratic
programming.
Oleh
karena
itu,
proses
pelatihannya hampir sama dan tahapannya dapat dilihat pada gambar di bawah ini, akan
tetapi
untuk
unsupervised learning dengan
SVM, data
pelatihan dan
data
pengujian
adalah
data
yang
sama.
Selain
itu,
untuk
proses
pelatihannya dapat
juga
hanya
menggunakan sebagian data dari data pengujian sehingga proses waktu pelatihan
menjadi lebih singkat, tetapi hal ini mungkin menurunkan akurasi pada tahap pengujian.
Sedangkan
untuk
supervised
learning
justru
sebaliknya,
dapat
meningkatkan
akurasi
pada tahap pengujiannya.
Gambar 2.2.6.5 Pelatihan dengan SVM
Batas
kemampuan komputasi
fungsi
linear
dibahas
pada
tahun
1960-an
oleh
Minsky
dan
Papert.
Secara
umum, pada
kasus
dunia
nyata,
pengklasifikasian domain
permasalahan memerlukan
ekspresi
yang
lebih
kompleks
dibanding
fungsi
linear
(misalnya fungsi polynomial, eksponensial, atau fungsi periodik). Trik kernel
|
 33
menawarkan
solusi
dengan
memproyeksikan data
ke
dalam
ruang
dimensi
yang
lebih
tinggi
(disebut juga dengan feature space)
untuk meningkatkan kemampuan komputasi
fungsi
linear.
Yang
dimaksud
dengan
dimensi
di
sini
adalah
ruang
dimensi
vektor
w
berada, yang akan mempengaruhi besar nilai n.
Adapun pemetaan
ke
ruang
dimensi
yang
lebih
tinggi
dilakukan
untuk
memetakan input ke ruang dimensi yang baru,
di
mana diharapkan bahwa pada ruang
dimensi
yang
baru,
domain
input dapat dipisahkan
oleh suatu
vektor sederhana,
yang
tidak dapat dilakukan sebelumnya pada ruang dimensi awal.
Adapun salah satu
pemetaan ulang data, dapat dicapai dengan memetakan
Sehingga fungsi penentu berubah menjadi:
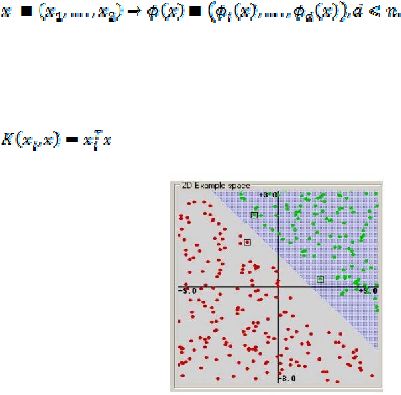
1. Kernel Linear
Gambar 2.2.6.5a Pemetaan Kernel Linear
|
 34
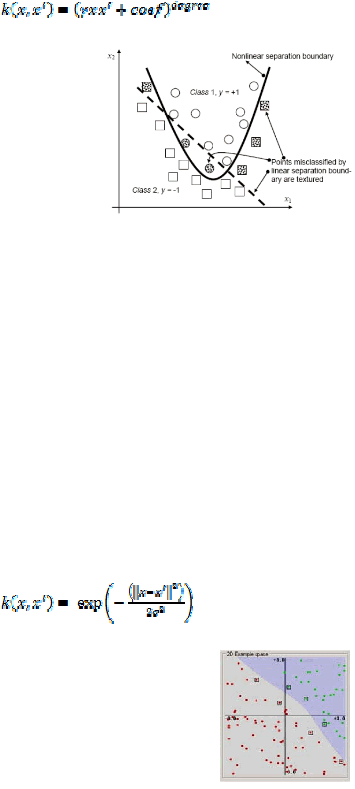
2. Kernel Polynomial
Gambar 2.2.6.5b Pemetaan Kernel Polynomial
X= Support Vector
X’= Besarnya Vector
Fungsi Kernel polynomial bersifat directional, yaitu output tergantung pada arah
2
vector dalam ruang dimensi rendah. Hal ini disebabkan produksi titik di dalam kernel
yang
menunjukkan bentuk dua dimensi
yang
jumlahnya banyak. Semua
vektor dengan
arah yang sama akan lebih tinggi dari output kernelnya, yang besar dari outputnya juga
tergantung pada besarnya vektor.
3. Kernel Radial Basis Function
Gambar 2.2.6.5c1 Pemetaan Kernel RBF
|
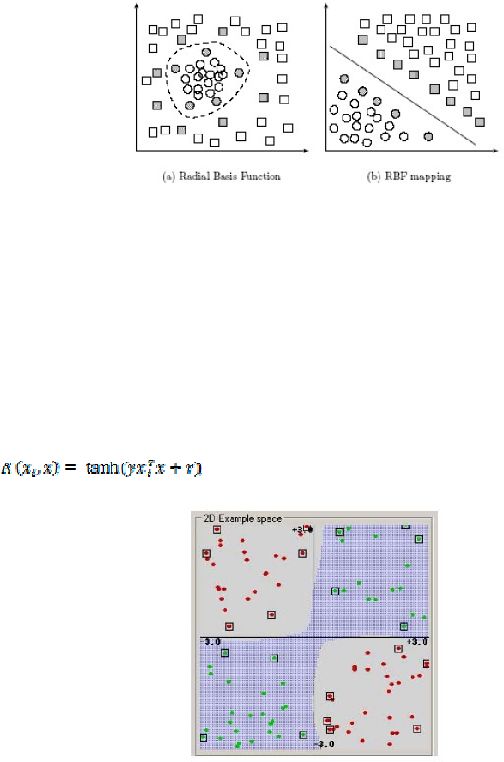 35
Gambar 2.2.6.5c2 Kiri : Original space, Kanan : Feature Space
Fungsi
radial
basis
yang
sering
digunakan adalah
fungsi
gaussian
karena
mempunyai sifat lokal, yaitu bila input dekat dengan rata–rata (pusat), maka fungsi akan
menghasilkan nilai
satu,
sedangkan
bila
input
jauh
dari
rata–rata,
maka
fungsi
memberikan nilai nol.
4.
Kernel Sigmoid
Gambar 2.2.6.5d Pemetaan Kernel Sigmoid
|