|
8
BAB 2
LANDASAN
TEORI
2.1 PLC (Programmable Logic Controller)
Sumber : PT OMRON Elektronik (2003), “PLC Basic Training Manual”.
Sebelum adanya Programmable Logic Controller (PLC), sudah banyak peralatan
kontrol
sekuensial, semacam cam
shaft
dan
drum. Ketika relay
muncul, panel kontrol
dengan relay menjadi kontrol sekuens
yang utama. Ketika transistor muncul, solid state
relay
diterapkan
pada
bidang
dimana
elektromagnetik tidak
cocok
diterapkan
seperti
untuk kontrol dengan kecepatan tinggi.
Sekarang sistem kontrol sudah
meluas sampai ke keseluruhan pabrik dan sistem
kontrol total dikombinasikan dengan
umpan balik, pemrosesan data dan sistem monitor
terpusat.
2.1.1 Komposisi PLC
Sumber : PT OMRON Elektronik (2003), “PLC Basic Training Manual”.
Komposisi PLC terdiri dari:
1.
Komponen hardware PLC
o
CPU
Central Processing Unit sebagai unit pemrosesan utama.
o
Power Supply
Berfungsi sebagai sumber tegangan.
|
 9
o
Memory
Berfungsi sebagai penyimpan program dan data.
o
Input
Berfungsi sebagai penerima
sinyal dari peralatan
input seperti sensor,
switch, dan
sebagainya untuk diproses pada CPU.
o
Output
Berfungsi sebagai pengirim sinyal
hasil pemrosesan dalam CPU
untuk dikirim ke
peralatan output seperti solenoid, motor, dan sebagainya.
o
Programming Device
Alat pemrogram
yang berfungsi untuk
menuliskan dan
memonitor program dalam
PLC seperti Programming Console dan komputer.
2.
Komponen software PLC
Program PLC
yang berbentuk
Ladder Diagram atau Kode
Mneumonic
yang
dituliskan ke dalam PLC dengan menggunakan Programming Device.
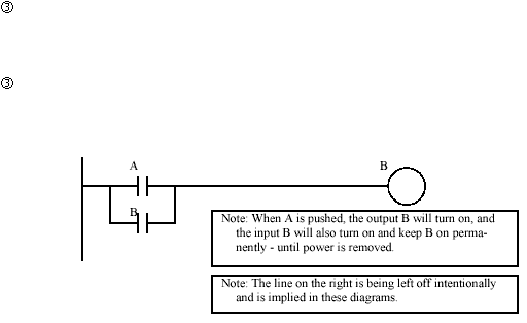
Contoh ladder Logic pada gambar 2.1.
Gambar 2.1 Ladder Logic, Sumber : Automating Manufacturing Sistems with PLCs.
|
 10
2.1.2
Operasi
PLC
Sebuah PLC bekerja dengan cara menelusuri (scanning) program
yang telah di-
masukkan sebelumnya. Siklus penelusuran biasanya lebih dari 3 tahap, tetapi difokus-
kan pada bagian yang penting saja. Bagian-bagian lainnya hanya memeriksa sistem dan
meng-update pencacah
internal (updating
internal
counter)
dan
nilai timer.
Berikut ini
adalah
3
tahap
penting dari
siklus
penelusuran
PLC seperti
yang
dapat dilihat
pada
gambar 2.3.
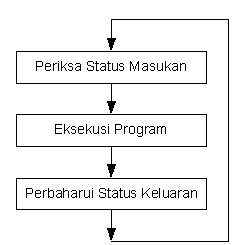
Gambar 2. 2. Siklus penelusuran PLC
Proses operasi PLC adalah sebagai berikut :
1. Periksa status masukan (check input status)
Pada langkah ini, PLC melihat keadaan setiap masukan yang ada untuk me-
nentukan kondisi setiap masukan tersebut apakah pada keadaan aktif atau non-aktif.
Dengan
kata
lain,
apakah
sensor
yang
terhubung dengan
masukan
pertama
|
|
11
aktif/tidak aktif,
masukan kedua aktif/tidak aktif, dst. PLC akan menyimpan data
masukan tersebut ke memori untuk dapat digunakan pada langkah berikutnya.
2. Eksekusi program (execute program)
Pada langkah kedua, PLC akan mengeksekusi program yang tersimpan di da-
lam
memori per
instruksi.
Misalkan program
menginginkan jika
masukan pertama
aktif,
maka
program
tersebut
harus
mengaktifkan keluaran pertama. Dikarenakan
program
yang
ada
telah
mengetahui
masukan-masukan
mana saja
yang aktif/tidak
aktif
dari
langkah
sebelumnya, maka
program
tersebut
akan
menentukan apakah
keluaran pertama harus diaktifkan atau dimatikan berdasarkan kondisi dari masukan
pertama
yang diterimanya.
Setelah
itu, program
akan
menyimpan hasil
eksekusi
tersebut dengan tujuan untuk dapat digunakan pada langkah selanjutnya.
3. Perbaharuan status keluaran (update output status)
Pada langkah terakhir ini, PLC memperbaharui kondisi keluaran berdasarkan
masukan
mana
yang
aktif
pada
langkah
pertama
dan
hasil eksekusi
program
yang
dimasukkan
pada
langkah
kedua.
Berdasarkan contoh pada
langkah
kedua,
PLC
akan
mengaktifkan keluaran
pertama
karena
masukan
pertama
sudah
aktif
dan
program
menginstruksikan
agar keluaran
pertama
diaktifkan
pada
saat
kondisi
ini
benar.
Setelah
langkah ini
dilalui,
PLC
akan
kembali ke
langkah pertama dan
menelusuri
ulang
langkah-langkah tersebut
secara
terus
menerus.
Satu
kali
penelusuran dapat diartikan sebagai
waktu
yang
diperlukan
untuk
mengeksekusi 3
langkah diatas.
|
 12
2.1.3
Diagram
Ladder
Sumber
:
A/chapter1.pdf
Pada sebuah PLC, diagram kontrol yang digunakan adalah diagram ladder. Dia-
gram
ladder
adalah
sebuah
bahasa
diagram
pengendali otomatis
yang
menggunakan
simbol-simbol. Pada awalnya diagram ladder hanya terdiri dari komponen dasar seperti
kontak
A
(NORMALLY
OPEN),
kontak
(NORMALLY
CLOSE), kumparan
keluaran,
timer,
pencacah,
dan
lain-lain. Selain
itu ada juga
perintah-perintah
aritmatika
yang
digunakan seperti penjumlahan, pengurangan, perkalian, dan pembagian. Simbol-
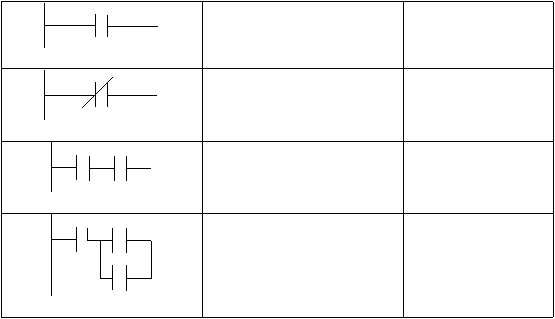
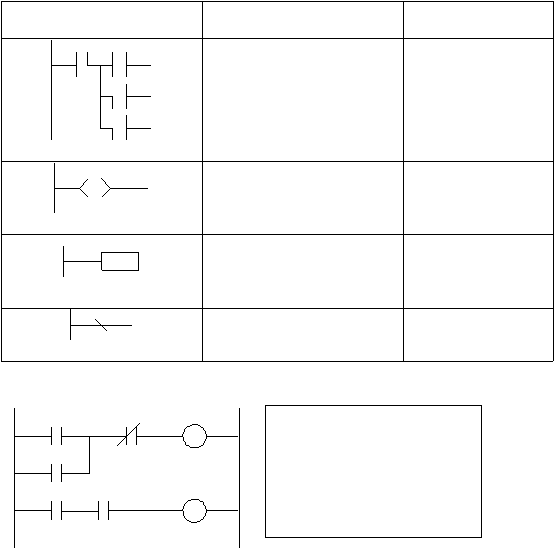
simbol diagram ladder dapat dilihat pada tabel 2.1.
Tabel 2. 1. Simbol-simbol diagram ladder
Normally Open
LD
Normally Close
LDI
Serial Normally Open
AND
Paralel Normally Open
OR
|
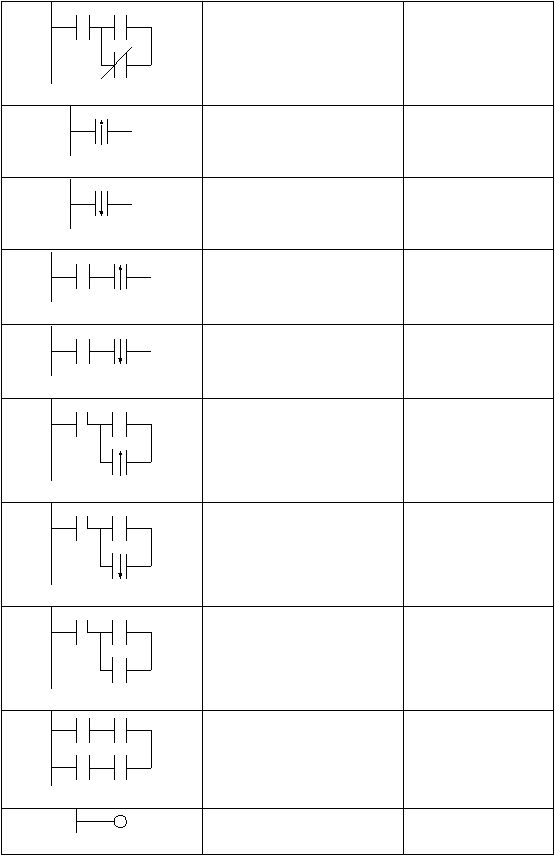 13
Paralel Normally Close
ORI
Rising Edge Trigger Switch
LDP
Falling Edge Trigger Switch
LDF
Rising Edge Trigger In
Serial
ANDP
Falling Edge Trigger In
Serial
ANDF
Rising Edge Trigger In
Paralel
ORP
Falling Edge Trigger In
Paralel
ORF
Block In Serial
ANB
Block In Paralel
ORB
Output Command Of Coil
OUT
|
 14
Drive
MPS
Multiple Output
MRD
MPP
Step Ladder
STL
Basic Command
Application
Command
Inverse Logic
INV
Keterangan :
A
masukan/tombol
start
B Normally
Close
(NC)
C
Normally
Open
(NO)
Y keluaran/relay
X keluaran/relay
Gambar 2. 3. Rangkaian Diagram Ladder
Pada gambar 2.8, keluaran X tidak akan aktif jika salah satu dari relay A atau C
tidak aktif.
Dan keluaran Y akan aktif hanya jika relay A dan C dalam keadaan aktif.
|
 15
2.1.4
Statement List
Selain
menggunakan diagram ladder,
sebuah PLC juga dapat diprogram dengan
menggunakan
instruksi
yang
umum dikenal
dengan Instruction
List
(
IL ),
Instruction
Statement ( IS ), atau Statement List ( STL ).
Gambar 2. 4. Diagram Ladder
Pada
gambar
2.9,
dapat
dilihat
bahwa
untuk
menghasilkan
output Q =
10.0
,
maka diperlukan input sebagai berikut :
10.0
10.1
Operasi AND diwakili dengan huruf ‘A’, operasi LOAD
diwakili huruf ‘LD’dan
operasi
EQUAL diwakili
dengan
‘=’ (baca:
sama
dengan).
Selain
itu,
operasi
OR
biasanya juga diwakili dengan huruf ‘O’. Penggunaan huruf besar dan huruf kecil dalam
perlambangan tersebut umumnya tidak menjadi masalah.
|
|
16
Selain itu, gerbang pertama dari suatu diagram ladder dapat diwakili dengan hu-
ruf ‘LD’
yang berarti
LOAD.
Dan gerbang akhir yang merupakan keluaran dari sebuah
diagram ladder
diwakili
dengan
huruf ‘OUT’. Untuk contoh kasus pada gambar 2.9,
pernyataan operasinya dapat juga ditulis seperti berikut ini.
LD 10.0
A 10.1
OUT Q10.0
Jika
ingin
meng-invers
sebuah operasi,
tambahkan
saja
statement
‘NOT’
pada
akhir
sebuah statement. Contohnya
dapat dilihat berikut ini dimana
invers dilakukan
pada statement pertama (LOAD) menjadi ‘LD N’ (LOAD NOT).
LD N 10.0
A 10.1
OUT Q10.0
Pada
umumnya,
perangkat
lunak
yang
digunakan
untuk
memprogram sebuah
PLC, dapat merubah bahasa pemrograman yang digunakan baik dari diagram ladder ke
statement
list
maupun
sebaliknya.
Namun
perlu
diingat,
tidak
semua
diagram
ladder
dapat dirubah menjadi statement list dan begitu juga sebaliknya.
|
|
17
2.1.5 Keuntungan
PLC
Sumber : PT OMRON Elektronik (2003), “PLC Basic Training Manual”.
Keuntungan PLC dalam sistem otomatisasi diantaranya:
1. Implementasi proyek lebih singkat
Didalam
PLC
menyediakan banyak
relay
dan
gate,
sehingga
mudah
untuk
implementasinya karena tidak perlu membuat rangkaian konvensional lagi.
2. Modifikasi lebih mudah tanpa tambahan biaya
Untuk
penambahan
atau
perubahan
fungsi
baru
tidak
diperlukan
biaya
tambahan
lagi.
3. Biaya proyek dapat dikalkulasi secara tepat
Biaya dapat dikalkulasi dengan tepat karena PLC dapat mengerjakan banyak fungsi
yang
seharusnya dikerjakan
oleh
banyak
controller
sehingga
tidak
perlu
mengeluarkan tambahan biaya untuk mengcover jika diperlukan tambahan controller
baru.
4. Training lebih cepat
Trainning lebih cepat karena bahasa yang digunakan dalam PLC relatif lebih mudah
dipahami
oleh
teknisi
dibandingkan dengan
dengan
mesin
yang
biasa
digunakan
untuk mengisi program dalam controller.
5. Desain dapat diubah dengan mudah melalui software
Perubahan dan penambahan spesifikasi dapat dilakukan ulang melalui software.
6. Rentang besar untuk kontrol aplikasi
|
|
18
PLC dapat melakukan banyak control, seperti :
o
Kontrol sekuens yang mempunnyai fungsi :
-
Timer / Counter
-
Pengganti logic kontrol relay konvensional
-
Pengganti kontrol PCB card
-
Kontrol mesin Auto / Semi-Auto / Manual dan proses
o
Kontrol kompleks yang mempunyai fungsi :
-
Operasi Aritmatik
-
Penanganan informasi
-
Kontrol servo motor
-
Kontrol stepper motor
o
Kontrol supervisor yang mempunyai fungsi :
-
Proses Monitoring
dan Alarm
-
Diagnosa dan monitoring kesalahan
-
Antarmuka dengan komputer
7. Perawatan mudah
Indikator input dan output mempercepat dan mempermudah proses Troubleshooting.
8. Kehandalan tinggi
PLC mempunyai kehandalan tinggi dibanding sistem konvensional karena
disamping PLC lebih tahan lama, PLC juga mempunyai efektifitas kerja yang tinggi
dengan selalu menghasilkan output yang tepat dan tetap.
9. Mampu bekerja pada lingkungan yang sulit
Beroperasi secara normal dalam kondisi temperatur, kelembapan, fluktuasi tegangan,
dan noise yang berat.
|
|
19
2.1.6 Software
Pemrograman
Sumber : PT OMRON Elektronik (2003), “PLC Basic Training Manual”.
Pemrograman PLC adalah penulisan perintah-perintah yang harus dilakukan oleh
PLC. Pemrograman
PLC
dapat
digunakan
menggunakan
berbagai
macam
alat.
Selain
menggunakan Programming Console, pemrograman PLC saat ini juga banyak dilakukan
dengan
menggunakan PC
(Personal
Computer)
yang
dilengkapi
dengan
software
pemrograman.
Software
-
software
yang
digunakan dalam
pemrograman PLC biasanya
terus
berkembang sesuai
dengan perkembangan hardware PLC.
Mulai
yang
bekerja dengan
sistem
operasi
DOS
sampai
Windows.
Untuk
setiap
merek
PLC
memiliki software
pemrograman tersendiri. PLC OMRON memiliki software pemrograman PLC tersendiri
seperti LSS, SSS, syswin sampai software terbaru CX-Programmer.
2.1.7 Komunikasi data
antara
komputer dengan
PLC
Sumber : PT OMRON Elektronik (2001),” CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2)
Programmable Controllers Programming
Manual”
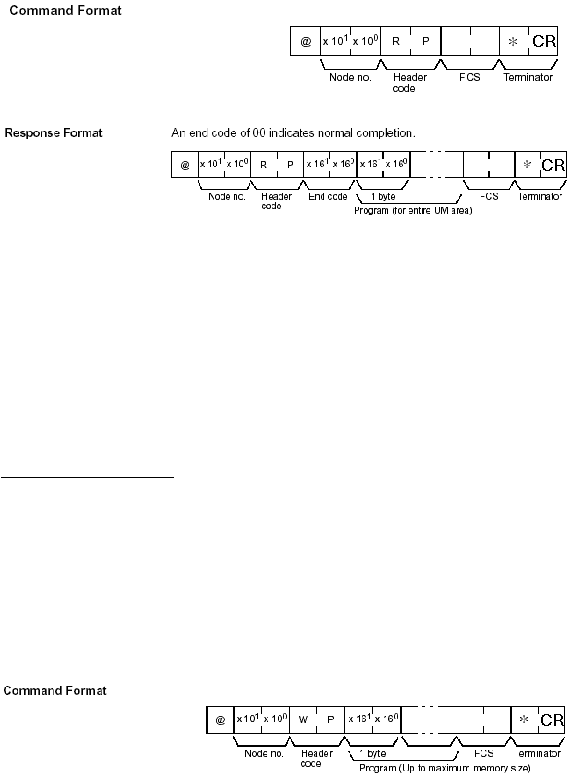
PROGRAM READ – RP
Perintah
ini
berfungsi
untuk
membaca
atau
mengambil isi
program
PLC
ke
komputer. Format perintah dan tanggapan dapat dilihat pada gambar 2.2.
|
 20
Gambar 2.5 Format Program Read.
Tanggapan :
Program tersebut dibaca dari keseluruhan program
area
Catatan: Hanya perintah ABORT(XZ)
yang dapat digunakan untuk menghentikan
operasi yang sedang berjalan.
PROGRAM WRITE – WP
Perintah
ini digunakan
untuk mengirim
program
ke PLC. Penulisa
program
hanya
dapat
dilakukan
jika,
hanya
jika
status write pada
kondisi
mode
program
serta
tidak
ada
kesalahan pada
PLC.
Program
lama
akan
hilang
bila
dimasukkan
program
baru. Format perintah dan tanggapan dapat dilihat pada gambar 2.3.
|
 21
Gambar 2.6 Format Program Write.
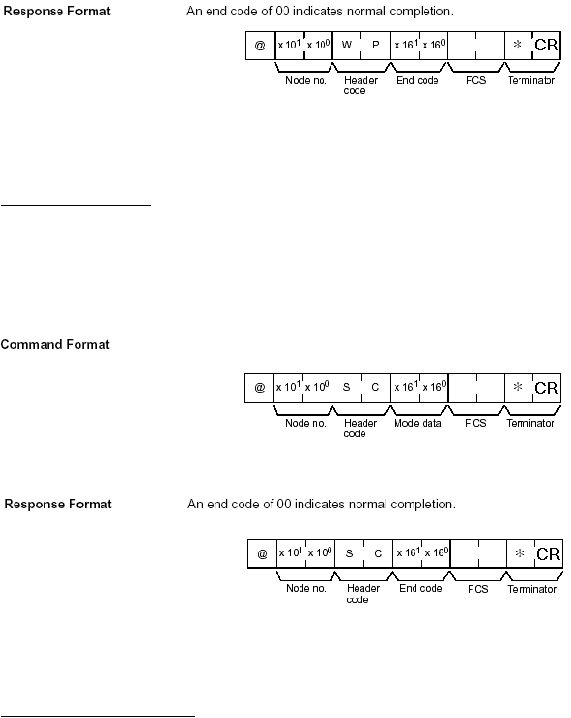
STATUS WRITE – SC
Penulisan status
digunakan
untuk
mengubah mode
operasi sesuai dengan
masukan informasi ke dalam mode data, dapat dilihat pada gambar 2.4.
Gambar 2.7 Format Status Write.
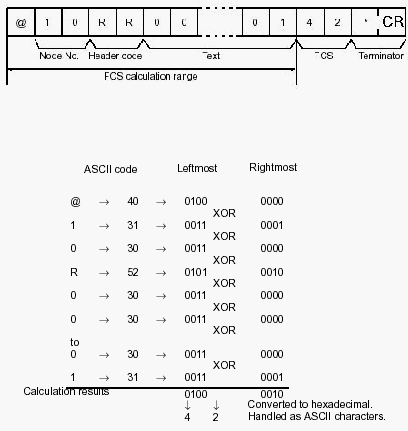
FCS (Frame Check Sequence)
Ketika suatu bingkai dikirimkan, suatu FCS ditempatkan tepat sebelum delimiter
atau terminator
yang digunakan untuk memeriksa kesalahan data telah dihasilkan. FCS
adalah 8-bit
data
yang diubah
menjadi dua
karakter ASCII. 8-Bit
data
itu
adalah
hasil
dari suatu perhitungan
XOR
nilai bit
dari
ASCII
data
paling
awal
sampai data
tepat
|
 22
sebelum FCS. Perhitungan FCS akan dilakukan setiap kali suatu bingkai diterima dan
mengecek hasil tanggapan terhadap FCS yang digunakan untuk melihat kemungkinan
kesalahan data yang dibuat.
Gambar 2.8 Format Perhitungan FCS.
Gambar 2.9 Cara Perhitungan FCS.
2.2. Serial
Port
Sumber
:
RS232 adalah standard komunikasi serial antar periperal-periperal. Contoh
paling sering dipakai adalah antara komputer dengan
modem, atau komputer dengan
|
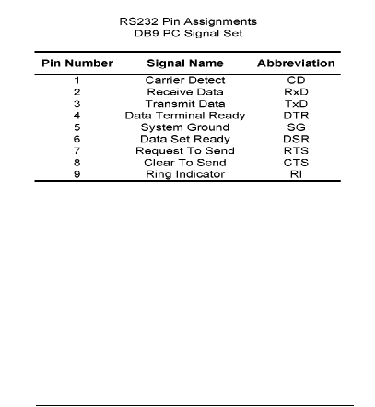 23
komputer. Standar
ini
menggunakan beberapa piranti dalam
implementasinya. Paling
umum yang dipakai adalah plug DB9 atau DB25. Untuk RS232 dengan DB9, biasanya
dipakai untuk serial port pada komputer pribadi. Dipakai untuk port mouse dan modem.
Tabel 2.2 Fungsi pin-pin DB9 standar RS232.
2.2 Motor
Stepper
Sumber : Al-Himaone, http://www.ilmu.8k.com/pengetahuan/stepper.htm. ILMU Web
Site Himaone Center
Motor
stepper adalah
perangkat
elektromekanis
yang bekerja
dengan
mengubah
pulsa
elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan
pulsa
yang
diberikan
kepada
motor.
Karena
itu,
untuk
menggerakkan motor
stepper
diperlukan
pengendali
motor
stepper
yang
membangkitkan pulsa-pulsa
periodik.
Penggunaan
motor
stepper
memiliki
beberapa
keunggulan
dibandingkan dengan
penggunaan motor DC biasa.
Keunggulannya antara lain adalah :
|
|
24
o
Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
o
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
o
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
o
Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
o
Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada
motor DC
o
Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung
ke porosnya
o
Frekuensi
perputaran
dapat ditentukan
secara
bebas
dan
mudah
pada
range
yang
luas.
Pada dasarnya terdapat 3 tipe motor stepper yaitu:
1.
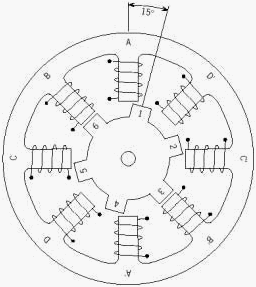
Motor stepper tipe Variable reluctance (VR)
Motor
stepper
jenis
ini
telah
lama
ada
dan
merupakan
jenis
motor
yang
secara struktural paling mudah untuk dipahami. Motor
ini terdiri atas sebuah
rotor
besi
lunak
dengan
beberapa
gerigi
dan
sebuah
lilitan
stator.
Ketika
lilitan
stator
diberi
energi
dengan
arus
DC,
kutub-kutubnya menjadi
termagnetasi. Perputaran
terjadi
ketika
gigi-gigi
rotor
tertarik
oleh
kutub-
kutub stator. Berikut ini adalah penampang melintang dari motor stepper tipe
variable reluctance (VR):
|
 25
Gambar 2.10. Penampang melintang dari motor stepper tipe (VR)
2.
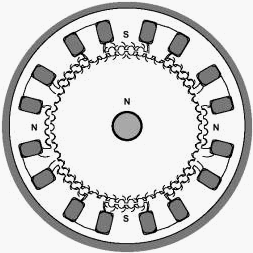
Motor stepper tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar
(tin
can)
yang
terdiri
atas
lapisan
magnet
permanen yang
diselang-seling
dengan
kutub
yang
berlawanan (perhatikan gambar
2.11).
Dengan adanya
magnet
permanen, maka
intensitas
fluks
magnet
dalam
motor
ini
akan
meningkat
sehingga
dapat menghasilkan
torsi yang
lebih besar. Motor
jenis
ini biasanya memiliki resolusi langkah (step) yang rendah
yaitu antara 7,5
0
hingga 15
0
per langkah atau 48 hingga 24 langkah setiap putarannya. Berikut
ini adalah ilustrasi sederhana dari motor stepper tipe permanent magnet:
|
 26
Gambar 2.11. Ilustrasi sederhana dari motor stepper tipe (PM)
3.
Motor stepper tipe Hybrid (HB)
Motor stepper tipe hibrid
memiliki struktur
yang
merupakan kombinasi dari
kedua
tipe
motor
stepper
sebelumnya.
Motor
stepper
tipe
hibrid
memiliki
gigi-gigi seperti
pada
motor
tipe
VR
dan
juga
memiliki magnet
permanen
yang
tersusun
secara aksial
pada
batang porosnya
seperti motor
tipe
PM.
Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena kinerja
lebih baik. Motor tipe hibrid dapat menghasilkan
resolusi langkah yang
tinggi
yaitu antara 3,6
0
hingga 0,9
0
per
langkah atau 100-400
langkah setiap
putarannya. Berikut ini adalah penampang melintang dari
motor stepper tipe
hibrid:
|
 27
Gambar 2.12. Penampang melintang dari motor stepper tipe hibrid
Berdasarkan
metode perancangan
rangkain pengendalinya, motor stepper
dapat
dibagi
menjadi
jenis
unipolar dan bipolar.
Rangkaian pengendali motor stepper
unipolar
lebih
mudah dirancang karena
hanya
memerlukan satu
switch
/
transistor
setiap
lilitannya.
Untuk menjalankan dan menghentikan
motor
ini cukup
dengan
menerapkan
pulsa
digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal
lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan
(V
M
)
pada bagian tengah (center tap) dari lilitan (perhatikan gambar 2.12).
|
 28
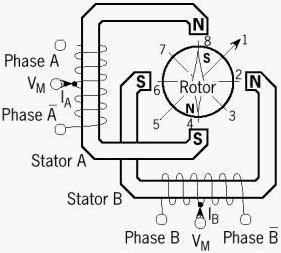
Gambar 2.13. Motor stepper dengan lilitan unipolar
Untuk
motor stepper dengan
lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah
dari positif
ke negatif dan sebaliknya. Jadi
pada setiap
terminal
lilitan
(A & B)
harus
dihubungkan dengan
sinyal
yang
mengayun
dari
positif
ke
negatif
dan
sebaliknya
(perhatikan gambar 2.13). Karena itu dibutuhkan rangkaian pengendali yang agak lebih
kompleks
daripada rangkaian pengendali
untuk
motor
unipolar. Motor
stepper bipolar
memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam hal torsi
yang
lebih besar untuk ukuran yang sama.
|
 29
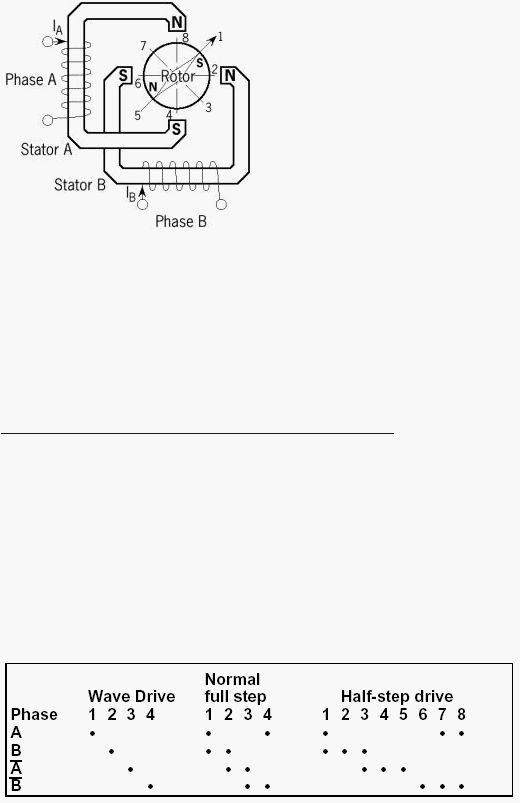
Gambar 2.14. Motor stepper dengan lilitan bipolar
Sumber
:
Industrial
circuits
application
note,
“Stepper
Motor
Basic”,
motorbas.pdf,
Stepping mode :
o
Wave drive
o
Full Step Drive
o
Half Step Drive
Gambar 2.15 Excitation Sequence
|
 30
Motor
stepper yang
dipakai
adalah
03-548-0250
2k945
3ohm,
1,8
Deg/Step
dengan dimensi 4,1 x 4,1 Cm. Stepper
motor tersebut dibuat oleh Sanyo Denki. Motor
ini
mempunyai
5
kabel
yaitu coklat, hitam, oranye,
kuning
dan
merah
dimana
merah
sebagai common power.
Gambar 2.16 Motor stepper.
Sumber: Wirz Electronics (1998), http://www.wirz.com/stepper/
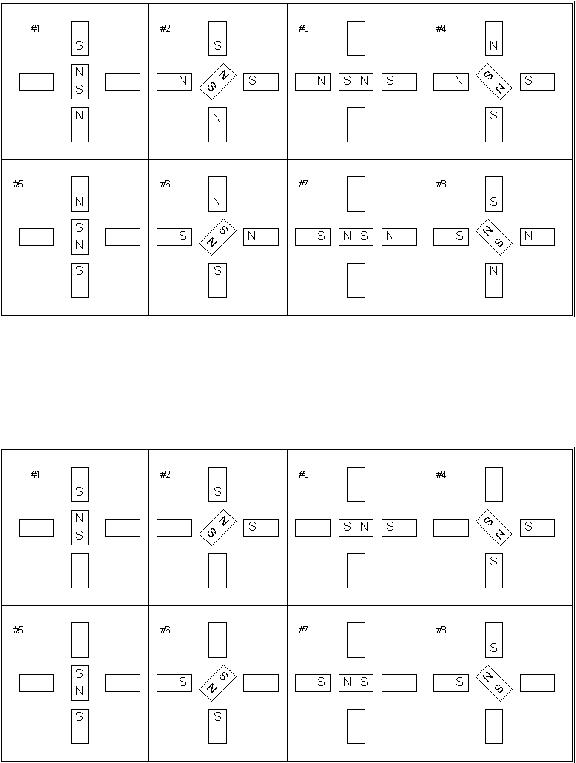
Terdapat tiga tipe Pergerakan yaitu Full Stepping, Half Stepping, dan Micro Stepping.
Bipolar
Full Step:
Gambar 2.17 Bipolar full Step
Unipolar
Full
Step:
Gambar 2.18 Unipolar full Step
|
 31
Bipolar
Half Step:
Gambar 2.19 Bipolar Half Step
Unipolar
Half Step:
Gambar 2.20 Unipolar Half Step
|