|
!!All
2
L%.NDASAN TEORJ!
2.1
Mk.rocontroiier
ATB9C52
Knmputer
secara
umlli--n
memi.liki 3 kornrr.;nen utama,
yakni
:
Centra1 Processing
Unit
(CPLJ
l'lfemori uml1lk program
dan
data
Sistt;;;m Input
Jan.
Output
(l/0}
CPU
mengontml semua
a.lm
irrfJrrnasi antara semaa komponen
yang
berada daJarn komputer
CPU juga mernpmses data dengan we akuka:n.
perhit:ltLgan
digitaL
Kebanyakan
scrnua proses
ditakukan
okh
Arithmetic
.logic
Urtit
(fo.J.,U) yang
bcreuiB. di dalam CPC
terseb1.1t
MicrocontroHer
adalah
sebuah
komputer
yang
lenglmp
ym1g
di
pmduksl
ke
dalam sebuah
cf11p.
Subsistem
TJO
dan_
memori
ya11g
terkandung
di
dalam
sebmih
micmcontroHer
sudab
dirancang
scdcrnikla.n
rupa agar
dapat
diter.: .pkan
pada haniwmc dan fungsi-ilmgsi
kontroi pada
apHkasi
Fasilitas-.f&silitas
y2!IIi.g
terdapat pada
micmcnntroller adahh se-perti
port
serial, port
input
dan
output
parale1,
timer,
counter,
interrupt
control,
Analog
to
digital
converter,
random a.cce:ss memory, dan
road
only
memory.
M1cmcontroller
AT??9C52
mcrupakan
adalah
sebuah
l.nikrokomputer
8
bit
yang
berdaya
rend.ah
Damun mempunyai
kincrjs
yang tinggi
ililengkapi
dengan
8K by:tes Flash
pmgra,."'llmable and erasable rearl
only
memory
(PEROM).
Alat
ini
|
|
6
dibuat dengan
mengguna.ican
teknoiog]
high density
nonvolatile
memory ATl\1EL
dan
kompahbel
dengan
standar
indus1ri
80C51 dan
80C52
pada
set
imtruksdm1
susuna.n
pinnya.
On-chip
Flash
iersetn.1t
dapa1 tii
program
ulang
sebanyak
1ODO
kali.
DeiD.gan. menggibungkar1
/?..
bit CPU
dengm1
Flash pada sebuah chip
monolitik,
ATW¥..:52
m.cmpakru1
sehuah
mik:rokomputer
handaJ
yang
menyediakan
fleksibihtas
ya..1.g
Hnggi
scrta
bisy.a
yang
efektif
untuk
berb:agai
apiikasi
pengendalian.
AT89C52
menyediakan keunggulan_-k:eunggtlfan sehagai
berikut
:
Kompatibcl dengar: pmdi..lk-pmdJJk l\1CS-5l
memori Hash
sehesar
gl(
bytes
dengan
kernam_pmm
baca tuhs
ulang
scbanyak 1000 lmE_
fully Static
OperatLon
:
0
Hz- 24
f.III-Iz
Tiga level pengundan memori_ progru:n
RAM sebes.ar 256 bytes.
32
buah
saluran I/0
3
bu:ah 16
bit
timerr atau
counter
arsitcktur
inttcrupt 2
ievel6
vektor
Port
serial
fiJH duplex
On chip csciHBtor
Clock
osilator
internal
Sebagai
tambahan, AT89C52 dira,_11cang dengan
logika static
untuk operasi_
dibawru1
frckuensn
noi
dan
menduktmg
2
sofuvare
pilihan
a.mtuk
mode
po-\ver
savir:g. Mode
yang
pcrttama
yaiJu Idlv Mode y-ang akan
menghentikan
CPU
|
 7
----
XYAl2
!>'/
>
\A< 0)
l!.!?
"'
'
PZ
5 {A
4)·
'
scmcntara membiarkan
RAM,
timer/counter, port serial,
dan system
interrupt
tetap
beija!an.
Mode
kedua
adalah
Power
Down
Mode
yang
akan
menyimpan
isi
RA.M
tetapi
menghentikan
osilator,
serta
mematikan
scrnua
fung:::.i-fungsi
cbip
yang
lainnya
sampai
reset hardware
bcrikutnya.
Perbedaan AT89C51 dan A'ft-:9C52 dapat
eli Iihal
pada tabel
dibawah
ini.
Tabel2.1 Perbedaan AT89C51 dan
ATS9C52
I
89C51
8
9C52,
cc-=---l
!
l
Memory
Rom
8kb
Memory _).{om
lebil_l besar
yaitu 8kh
2
Ram 2 x !28kb
Ram
3
"
128kb
3
Memiliki timer 0
dan timer
l
Memiliki timer
0
,
timer 1, dan
timer
2
--
4
Eksternal interupt 0
dan
1
E¥_stemal int
r:
tO, l,dan2
2.1.1
Konfigurasi Pin
AT89C52
POIP
(H_i
1-' 1
.
(I
vee
Ex;
P1.1
t'O
D f ADO)
p
1. 2 P.C•.I
jA[)·j!
Pi
3
r·, ·. ;.; {Ab:i;
P1.4 f>IJ
;j
ADS J
P1.5
PG.<'I
-:1\JMJ
P1.b
f;{}.
q
;.1\DSJ
Pi. 7
.:.. 6
\A06)
Hs:
f'IJ:. I
{AD'/')
XO,i
P3.0
EJ;;;;vpp
(T:XIfl)
a-.1
All!
i
PRO{]
rw
'l!Dy
?3
Jl'5£N
[nrrl}
0'8. 3
P2.1 .;A 151
(T
"'
4
I':L I'!
iAHj
;Wilt}
l'd.lt
07.4
{A2")
HHi;
P3
'
P:t.:i
{A'
t)
Xlill.."l
P2
1
,.,.,,n
(':JN !J P.;LG
Ga.mba.r
2.1
Mic:rocontroller AT89C52
|
|
2.1.2
Penjelasan Pip•da AT89C52
:
•
vee
Pin
ini dihubt.mgkan pada
Tcgangan
berupa
5
volt.
'iJ
GND
Pin
ini dihubungkan kt: GrOLmd.
'"
Port
0
Port
0
adalah port
I/0
8-bit dua arah drain terbuka. Sebagai port output,
setiap
pin
dapat
memasukkan
8
buah
input
TTL Ketika
nilai
1
dituliskan pada
pin
port
U
maka pin tcrscbut dapat
digu.'1aka.rr sebagai
inpul d.engan fmpedansi
tinggi.
Port
G
dap-&t
di rancang
sebagai bus address/data
rnultipleks
yang
tow
order
selama mengakses memori
data
dan. program ekstem.aL Pada mode
till,
PO
mempunyal intemal pullup.
Port
0 mem:nma kode bytes selama
pemmgraman Flash dan
mengel
mkan
kode
bytes
sdarna
verifika.;;i
progrrun.
Ekstemal
pullup
dipcrlukan
sdama pmses
verifika.">i
program..
<
Port
1
Port I ada1ah port I/0
8-b1t
dua arab. deng-an
internal puBup. Rufer
Olltput
port
1
d
pat
mer1arfk/mcmberRkan
4
buah input TTI._ Ketika niiai ¹
dituJiskan
pada
pin
port
1,
pin
itu. akan
di
pull
secara
!mat
o1eh
internal
pullup
dan
dapat
digunakan
scbagai
input.
Sebagai
tanJhahan, Pl.O
dan
Pl.l
dapat
dikonfigurasikan scbagar timer/counter sesuai tabe11ni
:
|
 Tabe!2.21'in Port 1'1
Port Pin
Altetnate Fund_ions
P1.0
T2 texlerf"la[ co-unt
input to
Timer/Counter 2).
-clock"-out
P1_i
T2EX
(TirnCr/CoutJter 2 captur-cnc1000 trigger
Bnd
clircciion control)
"'
Port'2
Pmi 2
adalah
port
¥/0 8-hit
dua
arah deng-..-tn
intt'mal
pullup.
Bufcr
output
port
2
dapat
mcnariklmemberiksn
4
buah
input TTL Ketika
nilai 1
diluliskan
pada pin port
2,
pm
itu akan di
puU secara kuat
oleh internal pullup dan. dapat
digunakan scbagai
mput
Port
2
mcmancarkan
byte alamat ni!ai
high
selama
mC'manggil
dari
memori
program
eksl
matdan
selama
mengakses
ke
rnemori
data
ya.qg
menggunakan
penga1amatan 16
bit
(MOVX @DPTR). Pada aplikasi
ini,
port
2
menggunakan pullup internal
yang
kuat
ketika
memancarkan
nilai 1
selama
mengakses ke memori
data eksternal yang
menggunakan pengal_amatnn 8 bit
(MOVX@ RI), port)
mem.ancarkan
isi
dari P2 Special .Function Register.
Port
2
juga mcncmna
bit-bit atamat
nila1 hig;1dan bcbcrapa
sinyal
kontrol
sdama
proses
vcrifikas1 dan
pcmogrc,man
Flash.
•
Port 3
Port
3
adaiah_ port I/0 8-bit dua arah dengan internal pull
up.
Rufer output
port ³
dapat
menarik/memberik&'l 4
buah input
TTL. Ketika
ntlai
1
dituliskan
pada pin port
3,
pin
itu akan di
puB secara
kuat
ofeh
internal
pu11up
dan
dupat
digunakan scbagai
input
->
|
 "·
.
Port
3
juga
menyedi.akan furngsi-fungsi
dari
bcbcrapa
kdcbihan
spesiainya
yang
beragam seperti
pada
AT89C5l, dapat di
Jihat pada tabel
di
bawah ini:
Tabel 2.3
Fin Fort 1'3
Port Pin
Alternate Functions
P'¹
1'
RXD
{serial input pod)
!
··-
'
'
,P3.1
TXD
fS£·(iCJIDI)tput
port)
'
I
'
-·
i
P3.2
fNTCJ
(exlcrrral intcrruplCl
P3.3
iN'IT
(cxtc-rnallnk:rn.:pt
)
·--•···
..
-·
P3.4
TO {ttmcr 0 cxtcril<.il input}
I
P3.5
Ti
(t;,T\U
1
external input)
P3.-6
VVR
(cxh:rrlal rJata memory \.'rite ;;trobc}
P3.7'
R5
{cxtcrnadata
mcrn r·'/
read
strobe}
•
RST
Input
untuk
reset.
Nilai
high
pada
mesin
m1
untuk
2
siklus
rnesm
sementata osihtor
sedang me!akukan
reset
pada
alat
e
ALE/PROG
Address
T
,atch
Enahle
adalah
pulsa
output
unmk
menahan
byte
low
pada
alamat
selmna
·mengakses
1nemori
ekstemal.
Pin
ini .JUga
merupakan
mput
pulsa
program
(PROG)
sdama
pc:mrograman
Flash.
PaU.a opemsi
nonnal,
ALE
dipancarkan
pada
rata-rata
konstan 1/6
dari
frekuensi
osilator
da..11.
dapat
digunhl;.a..r
untuk. iujuan
kepertuan timing/docking
eksternal.
"'
PSEN
Program
Store
Enable adalah
untuk
mcmbcri
pu1sa
ke memori
iuar
did."llam proses
pengambiian
data
dari
ROM'EPROM.
|
|
11
c
E.tVVpp
External Access
Enable,
EA
harus dihuburngk:an dcngan GNU dengan
tujuan.
untuk
memboh:!J.l.an
alat
memanggil kodc
dari rokasi
mcmori program
ekstemal berawal
di
OOOOH sampai
PFFfH.
EA
hams
dihubungkan
dengan
VCC
untuk
pengeksekusian
program
internaL
Pin
ini
juga
mcncnma
tcgangan
prograw..ming
enable
12
volt
(Vpp)
selama
p-enuogra_mm'll.
Plash ketika £2 vo1t progra.rnming dipiiih.
•
XTALI
Input
ke
penguat
osilator
pembalik
dan
input
ke
nmgkaian
open'iSl c.lock
internal_
e
XT/\L2
Output dari
penguat osWator pcmba!ik.
2.2
PWM (Pulse Width
Modulatio•)
Pada
dasnmya
FVVM adalah
proses
penga.tlrr'd11
kecepatan
secru:a
digital
ysng
digunakan
pada
motor
DC. Nlilai
tegangan
yang
diberikan
pada
motor
DC
tidakl.fuberubah (konstan),
yang
diatur
adalah
rasio
v.raktu
pemberian
tegangan
kepa.da motor tersebut
Maksudnyamembcrikan
pulsa-pulsa
yang
mentpunyai
lebar vvaktu on dan lebar waktu off membuat
motor DC herputar
lebih ccpal.
Vlaktu
periode
teJjadi
apaibifa
siklus
Ton
dan
Toff
terjadi parla
frckuensi
yang
sa:na pada kecepatan
ya..ng berbcda.
|
 12
Dibawah im adalah timing diagram PINM ·
T
PWM
,---- Sinyal PVi!M:
gam
bar 2.2
Timing Dia.g:r.am
P'WM:
2.3
MOTOR llC
Motor DC adalah alat
yang
menguhah pulsa listrik menjadi
gerak,
mempunyai
prinsip
dasar
ytlng
sama
dengan
motor
stepper
namu..."l
gerakarmya
bersifat continue
atau bcrkcianjutan. Motor DC dibagi
menjadi 2 jenis yaitu ;
Motor DC dengan sikat (mekanis kornutasi), yaitu motor yang memiliki
sLkat
karbon
berfungsi
sebagai
pengubah arus
pada
klli'1lparan
sedemiban
rupa
sehingga
arah
tenaga
putaran
motor
ak.an. sela!u
sama.
Motor
DC
tanpa
sikat
,
menggunakan
semi
konduktor
tmtu.k
merubah maupun
membalik
ams
schingga
layaknya pulsa yang
menggerakkan
motor tersebut
Biasa
digunakan
pada sistern
servo, karena
mempumyai
efisiensi
tinggi,
Llffiur
pemakaian
[ama, tingkat
kebisingan
suru-a listrik
rendkart:na putarannya
halus
seperti
stepper namun
putararmya terns
mcncrus
lanpa
adanya
step.
Sccara umuun
motor terdiri dari bag1an-bagian
:
e
.Armature
:
mengimboogkan
s1..E:1ber energi
Hstrik
dengan
motor.
Armafure
biaSa."lya berbentuk
sihn.der,
yfuJ.g
terdirl
da:"i
beberapa IiFtan:
konduktor.
|
 13
"'
Mtlgnet
:
fluks
medan
magnet
dari magnet
aka..11
dipotong oleh rotor. Bila
magnet
ini
berupa
liEtan
maka arus
yang
akan
menghasilkan
medat""t magnet
biasanya
sama dengan arus untuk
armature
I
rotor.
Magnet
inl biasanya
memiliki poSisi
yang
tetap
sehingga biasa
disebut stator.
-&
Brushes
I sikat
:
merupakan
penghubung
antara
armature
dengan swnber
tegangan.
a
Commutator··
menglmbungknn
lilitan pada. armature dan
hrushes.
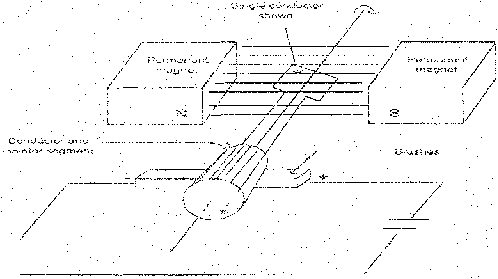
Kornpone1.1 dasnr
dari
sebuah
motor
DC
sederhana
digan.1barkan
dibawah
!UL
/
/
Gam bar 2.3
Komponen
Motor
DC
Dari
g;;unbar
Ui
atas,
sebuah
urmature
dengan satu
atau
lebih
lititan
berbehtuk
sayap
yang
sahng
berptsah
dan
herputar.
Setiap
lilitan
berujung
pada
sebuah
cincin
terpisah
(
Commutator },
d1mana
energi
(
listrik
)
diaiirkan
menuJu
cotnmutator
melalci
sikat
( brushes
).
Diantara
commutator
terdapat
isolator,
sehmgga cincin
ini
bcrlaku
sebagai sakiar
Double-Pole
Double-Tkrow. Pada saat
|
|
14
armature
berputar,
cnmmutator
akan
men-swrtch
arus
terus
meneru.s,
sehingga
medan
magnet
armatwe
akan bemilai tctap. Putamn
armature
timbuf
karena
medan
magnet
armature
mdawan
medan
dek..tromagnctik tctap
yang
disebutfie!d.
Pnda
Inotor
denga:n
magnet
tetap
(
Permanent
lvfagnet
),
field
ditimbulkan
oleh
magnet tctap.
2.4
Liquid Crysi•IDisplay (I,CD)
LCD
meru.pakan suatu
komponen
opru
elec:lrontc
yang
be:rfungsi
sebagai
alat penampil elektnmik
yang
mirip
dengan monitor dan diaktifKan
dengan
mole1m1 kri:stal
cair
(liquid crysta[)
yang
mempakan
unsur
utamanya.
K.ristal
sehamsnya
bcrbcntuk padat tctapi
Padat
dan
cair
mempakan du.a
stllll
benda yang
bcrbcda.
Molekul-molekui
benda
padat
tersebar
secara
teratur
dan
posisinya
tidak
beruba.h-ubah,
sedangkan
mo1ekd-mdekul
zat
cair
retak
dan postsinya
iidak
teratur
karena
dapat
bergerak
acak
ke
segala
arah.
Pada
tahun 1888 seumng
ah.li
botani,
Friedrich
Reinitzcr,
mcnermtkan
lJ.se yang
bera& di
tengah-tengah
antara.
fasc pada1
dan
cair.
Fase
ini
memiliki
sifat-sif.'lt
padat
dan
cair
sccara
bcrsama
sama.
Moiekul-
rno1ekulnya
memiliki amh
yang
sama
seperti
sifJ.t
padat,
tetapi
moleku1-mo1ekul
i.tu dapat
bergcrak
bcbas
sepertf
pa.da calinm. fase
kristal
cair
ini
berada
1ebih
dekat
dengan
filsc:
cair
k.arena
denga.n
sedikit
penarnbahan temperatur
(pema...""'msan), fascnya
langsung
berubah
menjadi
cair.
Sifat
iill
mcnunjukkan
sensitivitas
yang
tinggi
tcrhadap
1emperatur.
Sifat
inilah
yang
rne1
jad.i
dasar
utama
pemanfaatan
kristal cair
dalam
leknologll.
|
 15
i
Pacb
umumnya
J
,CD
mem11lki
b1dang
datar,
karena
tampilan
pada
layar
LCD
memiliki
batas
sudut
pandang
yang
optimum
untl1k
dapat
dilihat
dengan
jelas.
Jeni.s
LCD
yang dipakai
memilik:i
jumlah
kombinas1
2
baris dan
16
karaktcr. LCD lni tcrkcnal dengan
format
14 pin
tapi dengan tambahan 2 pin
UIJtuk
back
light.
Tabcl2.4 Fungsi
masing-masimg PfN
I
PIN
!
-Simbol
I
Deskripsi
I
I
!
!
1
OV
1
Power
Supply
2
i
+5V
!
I
3
J
Vcc
!
LCD
contrast control
input
4
RS
Pengaturan
Input register
..
·--------j
5
FJ\V
Read/Write
j
I
6
,
E
i
Enable signal
---
-----1
I
I
i
I
I
7-14TDO-D718
bit bi-directional
pdatn bus
I
I
15
/ Lamp-
i
Back -iight
supply, max.
90mA
:
I
I
i
I
16
I
Lamn+
i
'
I
2.5
SENSOR
Sensor yang
dlp.akm adalah sensor
encoder
atau
sebagai
runpan ba1ik.
Sensor
Penyandi
(Encoder)
digunakan
untuk
mcngubah
gerakan
linear
atau
|
|
16
putaran
menja.Ji sinyal
digitai,
dimana sensor
putaran
mcmonHor
gcrakan
putar
dari suatu clat
Sensor ini biasan_ya terdiri dari
2lapisjenis penyandi,
yaitu.;
1.
Pcnyandi rotari tambahan
I incremental encoder (yang mentransmislkan
jum1ah
t
rlenlu.
dari pWsa untuk
masing-masing
putaran) yang
akan
memha.ngkitkan
gel om hang kotak
pada objek
yang dlputar.
2_
Penyandi
absolut
I Encoder Absolute
(yang
memperlengkapi
kode
bi:nmy
terlentu untL:l
masing-masRng posisi su.dut) mempunyai
cara kexja
sang sama
dengan
perkecualian,
lebih
banyak
atau
lebih
mpat
pu1sa
gelombang
kotak
yang
dihasi!kan
sehi.nggct t:nembentuk
suatu
pengkodean
dalam
susunan
tertentu.
2.6
Logilrn Fuzzy
Fuz7J;·
Logic
pertmr_,_a
kah
dipcrkcnaJkan
olch
Dr.
LoLfi
A
Zadeh
professor
Computer
Science
Unlvcrsity
of
CalifOrnia
ili
Berkeley
pada.
tahun !965 dan
bcrhasil
di aplikasikan dalam bidang control oleh
R.H.
Mru111.dani.
Sejak
itu
aplikasi
darifilL..'"'J'
log:c
herkemhang
pesat. Kadang ootuk masa1ah-masalah
yang
rum
it tidak
cukup
hanya
berbas.i.s
pada
logika
False(O) Atau
True(
I)
,
m.asalah
yang berhubungan dcngan pemikiran
manusia misalnya. Fuzzy Logic
menggunakan
interval antaro.. 0
sampai
dengan
1.
P
·u...""zy
Logic
pada
dasarnya
merupakan
logika bernilai banyak
(lvfultivalued
logic)
:yang
dapat
mendefinisikan
nilai
diantara
keadaan
yang
hia.sa
kita
kcnal
seperti ya- tidak, hitam- put1h, benar- salah
dan
nol
··- satu.
Fuzzy
!,ogic
menirukan cara manusia mengamhi1
keputusan
dcngan
kemampuannya
|
 17
bekerja
dari
data
ya.l'lg
samar
atau.
tidak rinci dan
mcncmukan
pcnyeiesaian yang
lcpat.
FUzzy
Logic
bcrangkat
dar1
kcnyataan
balnva
dunia
nya:ta
ada1ah
sangat
kompleks.
Kompkksitas
ini
muncul
dari
ketid.akpastian
dalam
bentu..
kc
tida.l.;:
teHtian
(!mprecision)
inforrnasi.
Mengapa
komputer
yang
dibuat
manusia
tidak
mampu
mcnangani
pcrsoalan
yang
kompleks
dan
tidak
presisi
Ini
sedangkan
maniJ.Sia bisa ?.
Jawabnya
adalah
manusia
mempl.lliyai kemrunpuan
u..11tuk
menalar
(Reasoning) dengan
baik
yaitu
kemarnpuan
yang
komputer tidak mernpunyainya.
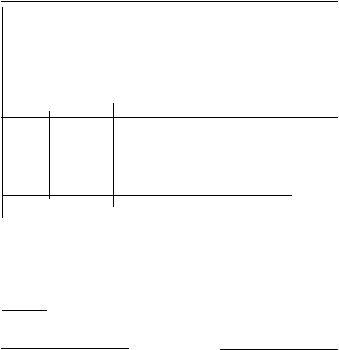
Mathematical
equations
Model-fres
)
methods
Fuzzy
system
Complexity of
system
Gam.bar 2.4
.Perbandingan Kompfeksitas da:n
Ke2klJlnat.an
dari Metorle yalOig
Pada
gambar
diatas
dapat
dilihat
perbandingan
antara
kompleksitas
atau
lk.t-:rumitan
suatu
sistem
dengan
presisi
dari
model
yang
digtmakan.
Dapat
djJihat
biia
pada
suatu
sistem
dengan
kompleksitas
kecii,
maka
persru-naan
maternatik
dapat
digunalk:an dan ketelitian
yang
dihasilkm.1
menjadi
sang.at
berguna
da'.!am
|
|
pemodehw.
sistem..
Rila
kompleksitas
hertamba...h
tetapi
data-data
spesifikasi
sistem
tersedia
mak.a
metode
pemodelan
scpcrt1
neural
network
dapat digun.ak.a.n
untuk
meminimalkan
ketidakpastian
mdalui
tindakan
pembelajaran
olch
sistcm
berdasarka.n
pola dan data yang
tersedia.
Akan tetapi jika
suatu sistem
memili.ki
tingkat kornp!eksitas tinggi
dimana
hanya
sedikit
data
yang
tersedla
dan
infonnasi
yang
tcrscdia
sangat
t.idak
pasti
(ambigu)
dan
tidak
presisi.
Persamaan
rnaterr.catik
menjadi
sulit
untuk
diciptakan
clm1.
digtma.knn,
dalmn
hal
i.ni .fuzzy
lo;:,ic
me:qjadi
salah.
satu
altematif
pcnydcsaiar...nya.
Fuzzy
Logic
mempakan
altematif
cara
berpikir
yang dapat
memodelkan
kekompleksan
suatu:
sistem
dengan
menggunakan
pengetahrum
dan
pengalaman
yang
kita
punyai.
Metode
fitzzy
logic
menggunakan
sekeiompok
atman-aturan
ymi.g dibua.t
berdasarkan
analogi
rasional
m2.nusm
untuk
mengambil
keputusan
saat
keadaan-kcadaan
tenentu
lerjadi
daripada
sebuah
persamaan
matcmatika yang
rumit.
Penalaran
fUzzy
akan
menyediakan
jalan
untuk
memahami
kinerja
dari
sistem
dengan
cara
menilai
input
dan
output
sistem
dari
hasil
pengarnata.n.
Defini$i.
metode
fuzzy
sccara
Icngk.ap
adalah.
: suatu
metode
kontro1
yang
pengrunbihn
kcputusarmya
didasarkan
pada
atumn-aturan
yang
dibuat
bcrdasarkan analogi
rasional
mam.1.sia.
D;;:Jam
penggunaan
Fuzzy rogic,
yang
perlu
dlpcrhatikan
ad.alah
truth
values
(nilai
kebenaran)
dan
;nembership
values
(nilan
keanggotaan
yang
menghubungkan
suatu elemen
pada
suatu
himpunan
dengan
tingkat
kcanggutannya),
yang
nihinya
herkis.nr
antam
0.0
sampai
1.0. Dim::ma
nilai
0.0
mcnunjukkan
kesalahan
mutJak
dan
1.0
menunjukkan
kebenamn
mutlak.
|
|
19
2.6.1
Konsep
Logil<o Fuuy
Sebelun1
membahas
1og1ka
fu7.zy
ada
haiknya
kita
mengenal
fuzzy
Set.
fuzzy
sets
adaiah
pcngcmbangan
yang
kbih
lar JUt dari
konsep
matematik:a daTi
sebUtah
set.
Sets
pertama kali
dipelajari
secara f.Ormal oleh
Ahli
matematika
dari
Jennan Georg Cantor(1845-1918).Teori ya"'lg
diungkapkannya
mendapat
banyak
tentnngan pada
zamannya,
sedang:Imn
sekllitmg kebanyakan
matematlkawan
pcrcaya
bahwa
sangat
mungkin
u.ntuk mengekspresik:an
sebagian
besar
masalah
matematika ke
Teuri Set
.
tintuk Engineer Control , Fuzzy logic dan FuJ:zy
Relations adalah hal
yang
paJjng penting
untuk memahami bagaimana
Aturan
Fuzzy
bekerja.
2.6.1.1 KunvensionaJ Sets
Sets
adalah
beberapa koleksi
darn objck-objck
yang
dapat
diperlakukan
sebagai suatu kesatuan.
G-eorg Ca.-cntor
mendeskripslkan
sebuah
set berda.sarkan
anggota-anggotanya,
seperh sebuah
item dari
universe
apak:ah
anggota atau
bu.kan. Istilah Set .,
koleksi,
dan
Class
ada.Jah
sama sepcrti
isti.lah
item,
element,
member.
Harnpir semua
yang dianggap set dapat diterima
sebagai
set da.lam
pengertian
matematika.
Contoh:
a. Set dari
bilangan
integer positifyang kurang dari 4.
mcmpakan
sebuah
finite
set
dengan
4
anggota (0,1,2,3).
|
|
20
b. Set
dari
Dinosaurus
hidup
di
basement
museum
lnggris_ Set
m1
tidak
mempunyai anggota
illm
d
11amakan
Set
kosong
(empty
set).
c.
Set dan
lhasil
pengukuran
yang
1ebih
besar dari
10 Volt
'iJ'/alauptm set ini
infinite
masih
mungkin
lmtuk
menentJkan
apakah penguk<.Jran
yang
diherikm11
merupakan sebuah anggota ataupun bukar:u.
Sehuah
set
dapat
ditentukan
herdasarkan
anggota-angotanya
dan
anggota
anggotanya
mernberi sifat ke set tersebut sepenuhn.ya.
List dari 1nember
A-{0,1,2,3} mcnyatakan Scbu.ah
Finite
Set.
Ticiak
bfisa mclist scmua cfcmcn dari
sebuah
infinite
set,
kita
hams
menyataka.ra
beberapa
properti
yang
menggam.barkan
eiernen-elemen
dari
set,
contohnya
predikat
x
>
10_
Set
tersebut
didefinisikru'1
oleh e1emen-c1cmcn
dari
universe
yang
mcmbuai
prcdikat
menjadi
True.
Jadi
ada
2
cara
mendeskripsikan
sebll.ah
set
yaitu
secara
eksplisit
di
dalam
sebuah list
atau
secara
implisit dengan sehuah predikat
2.6.1.2
Fuzzy Sels
Mcnurut
Zadeh
yang
merupakan
pencipta
fi!ZZY
logic
Kebanyakan
set
lebih
dari
sebuah
stand.ar
either or
urutuk anggotanya_
Sebagall
contoh St:t
dari
Orang orang
mudn.
Ray1 deugan
umur
I
tahun
akan
menjadi
anggota
set
tersebut
sedangkan
omng
dengan
umur
100
tal1W1
bukanlah
anggota
set
tersebut.
Tetapi
bagaimana
dengan
orang
yang
berumur
20,30,40.
Contoh
lailllnya adaiah
rarnalan
cuaca mcngcnai 1.emperatUI
tinggi,
angin
kencang,
hari
yang
cerah,
Pada
kasus
lain
sebuah standar
kclihaian bukan fuzzy,
tetapi sehenamya .Fuzzy antara lain
:
Batas kecepat:an
60
km/jam, jam
check
out dari hotel
jam ·12,
mum
bapak-bapak
|
|
21
50
tahun.
Professor
Zadeh
mengajukan sebuah
grade
keanggotaan
dimana tmnsisi
dari
keanggotaan(membership)
menjadi Non
anggola tcrjadi sccara bcrtahap
bukan
secara.
tiha-tiba.
Tingkatan
keanggotaan
untuk
semu.a
anggota..'lya
mil<.'l.h
yang
menggambarkan
sebuah Fuzzy Set. Grade
keanggotaan
secara mmnal
bcrkisar
dianta.rn ni!ai 0 sampai
1
yang scring disimbo!kan dengan
tfu"l.da
-
Makirn.
tinggi
nilainya
makin
tinggi
pula ting,.\.a.t keanggotannya.
Opemsi di Fuzzy Set ada 3 ant'lra 1a{n :
lntersection, ·union,
dan
Complement.
Seperti
telah
dikatakan
scbclumnya
dalam
mcnggunakan
fuzzy
logic,
ada
beberapa
hal
pokok
yang
perlu
dlperhati.\an
yaitu
truth values dan
membersh1p
values,fUzzy
sets,
membership
degree
dan
membership
function_
Himpunan
fuzzy
ada1ah
semua
penggambm1111
tentang
keadaan suatu
masa!ah.
Membership
degree
dan
membership function
adalah
tcrmasuk dalam himpunan
fuzzy.
Membership
function
mcmbcri
haslll
yang
disebut
membership
values.
Pada
masalah
yang
lebih
luas,
akan
ditemukan sub
himpunan,;fuzzyyang satu
akan
berpotongan dcngan sub
1:-.impunanfo:zzy yang
lain
dan
hi.11.1punan
fuzzy
akan
lcbih dari salu. himpunan.
Hai
ini
menyebabkan
perlunya suatu
opcrasi
himpu.nan
fuzzy,
yang
bergu.na
untuk
menentukan tingkat dcrajat
keanggotaan.
|
 22
Berikui penjclasan bcbcrapa jenis teori
fuzry :
a.
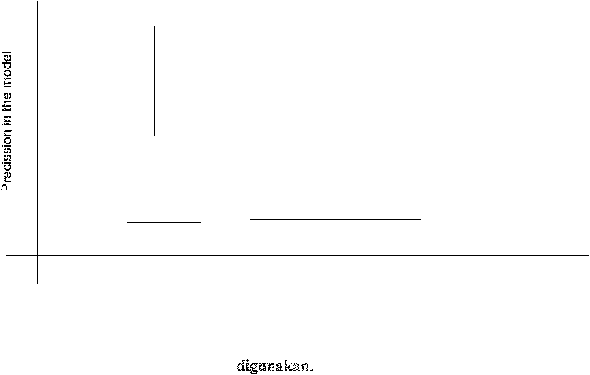
Sistcm
J?'uzzy
Sccara Um1llm
Development
System
Proses
Sistem
fuzzy
secara
wnu.m
dapat dihhat
pada
Gambar diatas. Pada gambar
tersebut
terdapat
blok
proses,
sistem fuzzy,
dan
sistem
pengembangan
(development
system).
Pihak
developer
diletakkan
paling
atas
pada
gambar
ini
Selain
itu, terdapat
dua operator,
yaitu scorang
yang bcrtanggung jawab
atas
masukan untuk sistcmfiJzzy dan kelu.aran
dari
prus,.;s, dan
semang
lagi
bertugas
ma.t"'llbawa
masu.kan ke dalam proses
dan
menentutkan keluaran drui_ sistem.fllzzy.
Operator
ini
sebenarnya
tidak
mesti_ seorang
operntor
rnanusia,
biasanya
sislern
fuzzy
atau
nrm-fu"''""'}'
yang
berfurngsi
mcngantarkan masdmn
atau
kduaran
sinyal
proses.
Dati
gambar ini
dapat dituruunkan beberapa sistem sistem fuzzy, seperti
pcngcndalifozzy, klasifikatorfuzzy,
dan
sistem
pendiagnosaanfuzzy.
|
 23
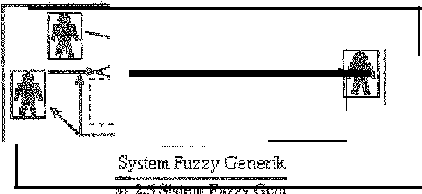
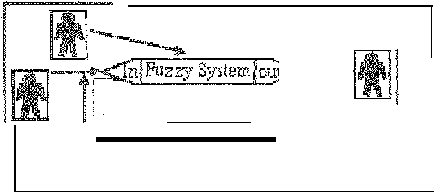
b. Sislem
Kendali
Fuzzy
m8nt System
nl
Fuzzy System
I
out
Proses
System Kendali
Fuzzy
Gam.bar
2.6
Sistem Kendal:i.
Fuzzy
Sebuah
kendah
fuzzy
yang
digambarkan
pada
Gambar
diatas
meru.pak..an
suatu.
sistem
1ingkar tertutup,
d.i mana tidak terdapat
operator
yang
menjadi
bagian
dari sistern tingkar
kendali
(control
loop).
Contoh
dmi_
sistem
kendali
ini
adaiah
vacuum
cleaner.
Sistcm
pada
aiat ini
mcngatur
daya
motor
penghisap
tergantung
pada
banyaknya
debl.i.
di
lantai
atau
karpet.
Contoh
lain
dari
sistem kendali fuzzy
adalah
uptimisasi
torsi
dalam
sistem
anti
slip
yang
digunaka:o_
kereta
Estrik
dan
sllstem
kereta
bawah
tanah_
Masukan
sistem
kendah
berupa
k:cccpatan
kcreta
dan
koefisien resistansi reL
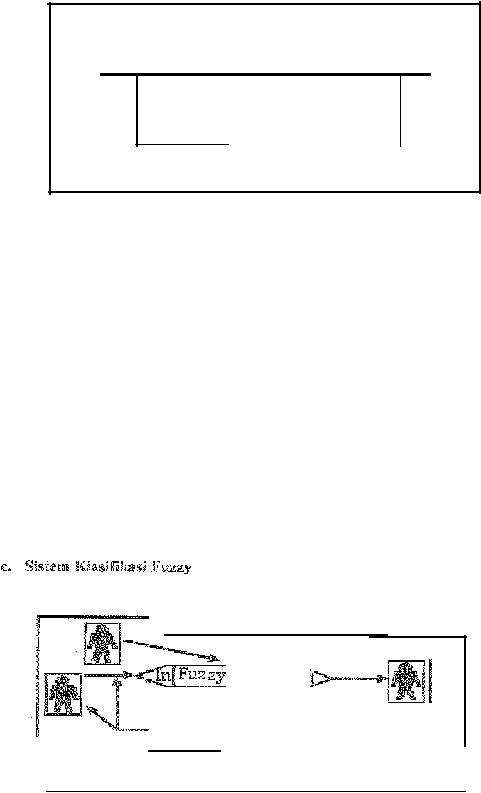
Deve:lopment System
Proses
Sistem Klasifikasi Fuzzy
G-.l!mbar
2.7
Sistem
Kfasifika.sl
Fu7...zy
|
|
24
Pa.da
sistem
kla
lfikasijUzzy diams
tidak
tcrdapat
loop
te1tutup.
Sistem
ini
hanya mcncritr.ra masukan dan keluaran dari proses untuk selanjutnya
memberikan
in!Ormasi
bcrupa
kondisi
(stale) dari
proses
tadi.
Infom1a.si
kondisi
ini dapa.t digunakan untuk
mengendahkan
sistcm atau
mcmberikan
tangguil.g
jawab
kendali
kepada
operator.
Secara
matematis,
sistem
ldasiflkasi
lebih
dekat
pada
tcori
llimplman
daripada teori
fungsi_ Pada
sisten1
ini, sifat
kesarnaam
(Vagueness)
sering
ilitemui pada opini pakar dan
jarang
menggunak:an
modd
relasi
fuc:z_l.'
Contoh darn
sistem ldasifikasi
fuzzy
ada!ah
mesin cuci fnzzy.
Beberapa
va:dabeUparameter
mesin cuci
ditentukan berdasarkan
jurn.lah
dan jenis pak.aian.
Keiuaran
atau
infonna..:;i dari
sistem
klasifikasi
ini
digunakan
untuk
menentukan
jertis
spin-dry serta
lembut
atau
kasar
gesekan
pakaian
yang
optimal.
Contoh
ke
dua
dari sistcm
fuzzy ini
adalab.
sistcm
transmisl
otomatik
fuzzy.
Sistem
ini
mengguna.\an
beberafrYa
ser:asur yang
dit:aruh
pada
slstem
ABS,
sistetn
power
steering,
sistem kenda1i
motor,
dan
baginn
penting
ia.i.nnya. Sclama
kcndau-aan
berjahun,
sistem lin:i
akan
terns
mcmantau
dan
mcnilai
kondisl
mobil
tersebut,
seperti
beban
kcndaraan,
ilwndisi
mobil
pada saat
melewati
jalan
yang
menanjak
atau
mcnumn
dan konilisi-kondisi
lairmya.
Pada
Gambar diatas,
gambar
operator
manu..sia pada kiri dan
kanan
sistem
klasifikas1
fuzzy,
biasanya
rnerupakan
suatu
sistem
khusus
yang
bertugas
mcmbcrlila."'l
inlOrmasi
yang
dipedukan
untuk
kemudian
di
proses.
|
 25
d.
Sistem
Diagnos,is
Fuzzy
Development System
Proses
Sistem
Diagnosis
Fuzzy
G-JJ.mbar
Diagnosis
.Fuzzy
Pada sistem diagnosis
fuzzy
gambar diatas pcranan manusia!opcrator Icbih
dominan.
Pengiriman
data
dilaksanakan
oleh
operator
ke
dalam. sistem,
ketika
s1stem
memedukan
data tarnlxu1.an.
Selain
Itu
operator dapat
mem.intn
atau
mcn<?w.'1yakan
in.iOrmasi
dar.i s.i.stcm dlagnosis
bcrupa
hasil
konklusl diagnosis atau
prosedur detail hasil diagnosis
oieh sistem.
Dari sifat s.istem
ini,
sistem
diagnosis
fuzzy dapat digolongkan pada sistem
pakarfi.Jzzy_ Sistem pakar
fi. .:z:y adalah sistem
pakaJ
yax1.g
menggunakan
notasi _firzzy pada
aturan-aturan
dan
proses
ir.jf::rensi
(!ogika k ?putusan).
Salah
Sali.D.
kelebihan sistem
pakar fUzzy
dibar:.dingkan
sistem
pakar
konvensional adalah jumlah
aturan
lebih
sedikit,
sehin_gga sistem iebAh
transparan untuk
dianalisa.
Kekmangannya
adalah
kchandalan.
sistem
sang-.:tt
terganttmg
pada
baik-buruknya
proses
pcngumpillan aturan
seperti
prosedur
pertanyaan dan komponcn-komponen
kuisioner,
serta sermg tewjadi
kesulitan
unt,1k mcnyimpcilk_an su.atu.
pernyataan
tertentu
oleh
operator.
Bfdang
aplikasi
si
tem
diagnosis Ini
bia"anya suahJ
proses yang
besar
da...'1
kompleks,
sehingga
sangat
SLllit
dianaiisa
menggunakan algoritma
eksak
dan
dimodelkan
dengan
model
matcmatika
biasa.
Pada
permuharo
persiapru1
sistcm,
|
|
26
jumlah. aturan
yang
digunakan
ini
biasanya
sangat
banyak.
Namun
pada
tahap
akhir,
jumlah
aturan
akan
lehih
sedikit
dan
mudah
dibaca. l:ni
merupakan
sifat
sistcm
pakar fiezy, seperti
yang
dikatakan
olelb. Prof
Zadeh, bahwa sistcm
pa.k:ar
f..azy
akan
menggunakan
aturan-aturan
yang
lebih
sedikit
dihandlngkan
sistem
p<ikar
konvensional
sehingga
mudah
dibaca
dan
mcmbantu
mcnghindarkan
inkonsistensi dan
i.nk:ompht
sistem
pengendali_
Yang pedu
diperhatikan
pada
sistem
diagnostL."k
rm
adal
tidak
bcr!ak:unya
proses defuzzifikasi,
karena sistem
ini
hanya
menghasilkan
sifat
keluaran
berupa
aproksimasi
!Inguistik
yang
n1erupakan
suatu pemyataan ataujawahan
yang
mudah
dipahami
oleh
operator.
2.6.2
Fuzzy 'Logic
ControHer
Fuzzy
dipergunakan
sehagai
pengendall motor
de
Karena
fuzzy
logic
mempunyai
kinerja
yang
baik
dalrun
rnengatasi
sistcm
tidak
linear
dengan
data
input
yang
scdikit
dan
persamaan
matematis
yang
dnper!ukan
ptm
tidak
rumit
atau
sederhanajika
dihandingkan dengan
metode-metode lainnya seperti Proportional
!ntegral-Oerivative (Pill),
dan
Model
Reference
Adaptive Control (I\1RAC).
Sistem kontrol bcrbasisk.an
mikropmsesor
digital
banyak d1gunak:an
dalam
proses
kuntrol
suatu
sistem.
Bila
diba11di-nglmn
dengan sistcm
kontrol
secara
analog, sistem
kontrol
digital
jauh
lebi.h
flcksibc!
dalam
responnya.
Hal
tersdmt
disebablmn
karena
banyaknya
variasi
aigoritma
yang bisa
diterapkan
da1mn
sistem
kontrol
digital.
Sistem
kontrol
digital
mempunyai
keunggullan
lcbili
balk
untuk
menangani
ketidak-lincaran.
dari sistem, pe:rubahan
keadaan
pada
|
|
27
sistem sepexti
perubahan
bcban,
supply sistem
dan
juga
perubahan
parameter-
parameter
Iniooya.
Algoritma
yang
diguJiakan dalam
sistem
kontmt
digital
dapat
dipirih
berdasarkan
beberapa mctodc tcrtcntu
scperti
Proportional-lr.tegral-nerivative
(Pill),
lvfodel
Reference
Adaptive
Control
(MRAC).
Metode
kontrol
PlD
cukup
efektif
1.mtuk
menan_gani
sistem
dengan
respon
tetap
namun
hila
sistem
menjadi
tidak Linear
maka
sistcm
PID
akan
mengalam1
kesulitan.
Metode
l\tfRAC
dapat
menangani
ketidak-linearan
sistem
dan
lingkungan
kontrol
yang
berubah-u:bah
dengan
cam
membandi11gkan hasil
proses
output
a1ctual
dengan
model
referensi.
Namun rnetode Ini membutuhkan
model
maternatika
dari
proses
yang
bcrlangsung untul mensimulasikan rdasi
inpl.l.t-Olrtput.
lJntu...\
menciptakan
modei
matematika dari
sistem tentunva merup
.
akan
kesulitan sendiri.
FLC
ada1a11 m,erupakan pengembangan
dari
teori
fuzzy logic
dan
digunakan
1mtuk
pengontrolan
suatu
alat
ataU-
sistem.
Seperti
halnya
pola
pikir
manusia
yang
mcmbuat
k:eputusan
(making
decision),
didasarkan
atas
aturnnR
atw:an
yang
ada
maka PLC
akan
bertindak sama.
Pola pikir
manusia
d.alam
membuat
keputusan
hila
diterapkan
pada
fogika
komputcr
merupakan
kalimat
if-
then,
begitu
pula
pada
.FLC,
FLC
akan
bekerja
berd.asarkan
aturan.
yang
ada.
Contohnya
lf
A
then
Y,
2.tau
IfB then
Z.
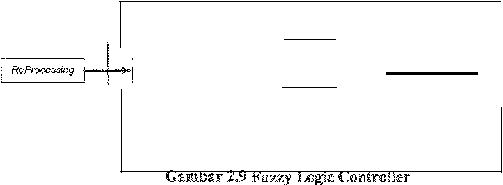
Dibawah
i11i
adalab.
bagan
FLC:
|
 28
I
a,,
I
'
Rule
'
I
I
DeFuzzification 1
!
,---------
•
I
Post Processing
1
1
/nference
i
engine
I
Aturan
padn
fuzzy
logic
(_fuzzy
rules
)
&mgatlah
penting
didalmn
FLC,
anluk
mcncrapkan
teori
fuzzy
logic.
Olch
sebab
itu
dipcrlukan
langkah-langkah
seperti baga_n diatas
tersebut yang
meliputi :
e
Fuzziflcatwn, yaitu
proses penentuan masukan (
input
) yang akan diubah
nilainya
oleh
membership function.
®<
Rule
Evaluatwn,
yaitu
proses
dimana
nihl
hasil
dari
.fuzz(fication
dibandingkan
dengan
aturan-aturan
yang telah dibuat.
®
Defozzification, menguhah
hasil
dari
rule
evaluation mcnjadi
illlai
yang dapat
dijalankan
(crisp output).
2.6.2.1 Fuzzillkasii
Proses ini
berfungsi
untuk
membah
suatu
besaran
analog/digital
menjadi
fitzzy
input. Secara
diagmrn_ blok
dapat
diiihat
pada gambar dibawah
ini
:
|
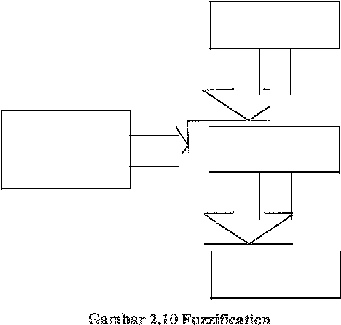 29
CRISP
INPUT
INPUT
MEMBERSHIP
FUNCTION
FUZZIFICATION
FUZZY
INPUTS
Prosesnya dapat
dijelaskan sbb
:
Suatu
bcsaran
analog
dimasukkan
scbagaf
input
(crisp
input),
lalu
input
tersebut dimasukkan pada batas
scope/domam
(merupakan suatu batas dari
kumpuian
input tertentu,
misalnya
panas
antara
60-
f
OODC)
sehingga
input
tersebut
d.1.pat
dinyatalam dengan
Rabd
(dingin,
hangat,
panas)
dari
membership
function.
Jviembership
function inl
biasanya
dinamakan
membershp
function
input.
Dari
membership
jUnctwn kita bisa mengetallmi
herapa degree t?f membership
function-
nya.
(rnernberikan
hobot
pada suatu
input
yang
tdah
kita
berikan
sehingga
input
tadi
dapat
dinyatakan
dengan
suatu
nilali,
biasanya
antara
0,0-1,0).
Contoh
dari
prosesfuzz{(ication
adalah sbb:
|
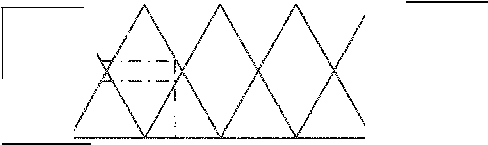 30
Sangat
Dingin
Dingin
Hangat
Panas
Sangat
Panas
x1
·- ·- -
·-
·
x2r----
O'
20°
40° 47°
60°
80°
100°
120°
Gam bar
2.11
Membership
Furnction
Dari
mbar diatas
dipemieh crisp
input a.dalah
47°C.
Sebj_ngga didapat
2
fuzzy
input
yang
masing-masing adalah
:
Dingin (Xl)
dan
Hangat
(X2),
niiai
Xl
dan
X2 d.apat dicari dengan rumus persama&."l
gdris. Yang menentukan
system
tersebut sensitive atau tidak adaiah
memhership
function
ini. Jika membership
f'1nction-nya banyBk maka
system
akan
meqiadi
sangat
sensitive.
Yang
dimaksud
ser.sitive disini
adaiahjika
inputnya bewbah sedikit
saja maka
system
akan
cepat
merespon
Jan
menghasilkan suatu
output lain.
Output dari
f"'-z;:ification
ini
adalah
sebuah nilai
inputfozzy.
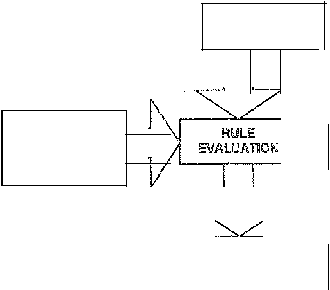
2.6.2.:2 Rule
Evalll.J.atiow.
Proses
ini
berfungsi
untuk
mencari
suatu
nilaj.fUzzy output
darifozzy
input.
Sttatl.!.
nihi fuzzy
input
yang
bcrasal
dari proses
fozzification
kemudian
dimasukkan
kedaiam
scbuah
mie
yang
telah
dibuat
untuk
dijadikan
sebuahjic.zy
output,
dapat digambarkan sbb:
|
 31
FUZZVINPUT
RI!Jl:ES
I
FUZZV OUTPUTS
G.amba.r 2.12
Rtde
Rvaluat]on
Gambar
()iat.as
mempakan
bagian
utama
daii.fhzzy,
karena
disinHah
sistim
akan
bdajar
menjadi
pintar
atau
tidak.
JJka
system
tersebut
tidak pintar
dalam
mcngatur
rule maka
system
yang
akan
dikontrol
menjadi
kacau_ Format
dari
nde
adalah
sbb:
"If antecedent1
operator
antecedent2 then_ consequent I
operator consequ.ent2"
Contoh:
"If suhu
is
panas and
kdcmbapan
is
kering then
penyemprot is
sangat lama"
Ada beberapa
operator yang
digunakart daJru:n..fiiz.zy
:
And, Or, Not.
Jika
operator
yang
digunakan
adalah
And
maka
input
yang
tcrkccil dlambii. Misalnya
:
"If suhu
is
panas (0,15) and
kdcmbapan
(0,19)
then
penyemprot
sangat
lama"
Nilai_fiJz:;y
output
dari
pernyataan
tersebut
adabh
0,15.
Nilai
0,15
dan
0,19
dari
contoh
diatas
diambil
dar:i
dua
membership
function
input
dcngan
cara menarRk
gar1s !.urus vertical
dari
nilai
yang diffiginkan. Jika operator
yang digw"l.akan
adclah
Or,
maka
j1.c:zy outputrrya
diambil
dari nilai yang terbesar.
Jika
operator
|
|
32
yang
digunakan
adalah
adaiah
operator
Not
rnaka
.fuzzy outputnya
adalah
kebalikannya.
MisaJnya
Not 0,9
maka
akan
menghasilkan
0,1
dan
Not
0,8
akan
mcnghasilkan 0,2.
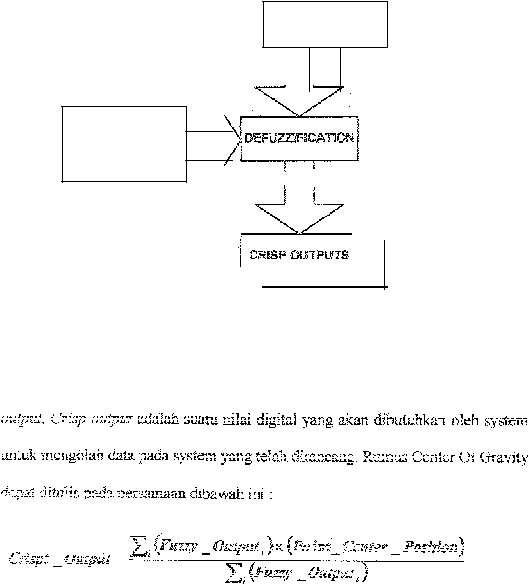
2.6.2.3
Def111zzifi.kasi
Proses
defuzzifikasri
merupakan
proses
untuk
memet-1ka11 data
dari
lingkungan
fuzzy kembali
menjadi
daia
yang bisa
diaplikasikan
tmtu.t;.
kontro1
sistem. Sebagai
contoh, dalam
memberikan.
instr:..lk:si
ke
motor
DC
untuk
mempercepat
putamnnya
tidak
bisa dilaksanakan dalam Hngkup
besarru1 fuzzy
sepe1ti
"tru:nbuh
sedllkit
putaran
motor".
Kita hams
mcncrjcmahkan
perintah
tersebut
kedalam
suatu
nilai
crisp
misahlya
:
tambah
dz.1y
cycle
motor
sehesar
25%.
Proses
defll.lZZffikasi
dimulai
dari
rnasukknya
fuzzy
output
kodalam
proses
kemudian
sistem
akan
mengrunbil
data
dari
output
membership
function
untuk
mehhat
perintah
(daiam
bcntuk
Pilai
Center_poinO
apa yang
hams
diap1-ihsibn
unto.l!c sctiap
fungsi kearrggotaan
yang
aktif
dalam
proses
f.Jzzifikasi.
|
 33
FUZZV OUTPUTS
OllTPU'i
MEMBERSHIP
FUNCTION
Gam bar 2.13
Defuzzification
Ni.!ni-nilai
tersebut
dimasukkan kedaiam
suatu
rumus
ya11g
dinamakan
COG (Center Of Gravity) untt.J...l{
mcndapatkan ha'sil
illir
yang
d
;;.:but
crisp
|