 Pe:nmgkat Ajar
BAB2
Menu
t
Cotton
(!997,
;Jerangkat
aJar
dibutuhkan
da
mengembangkan pengetahuan
para siswa
di
sekolah,
Melalui
perangkat
ajar
siswa dapat
lebih mengetahui suatu proses,
dibandingkan
hanva
sekedar teori.
Perang1<at
ajar
sebaga.i
bantu
dapat pula menggunak.an bantuan me
komput;:r, dengan menggunakan suatu so:ftware
khusus. S(iftware khusus
dikenal
dengan
sebutan Computer Assisted/Aided Instruction (C!J.lj.
:2..1.1.1
Sejamh CAl
Percobaatl
penggurman
komputer
untuk
memperlancar
pr
belajar-mengajar
di
mulai
Amerika Serikat
;Jada
a..ldnr
tahun
1950
awal
tahun
1.960.
Se!anjutnya
istilah perangkat
ajar
yang dikenal
seba
CAT
pertama
kali
diperkenalkan
oleh
Untvasity of Harvard
pada !a
1965
yang
kemudian
beke'ljasa.rr,a
dengan
IBM
(International
Bus
lv!achine)
pada tahun
1968 d'lakukan
penelitian
terh
ilnplen1entasi
dan penge1nbangan dari
di Slanford.
tahun
1970-an
perkembangan CAI
berja!an lambat, kar
junalah perangkat
keras
yang
terbates dan
mahalnya
biaya.
Setelab ta
i
980-art
IBM
memperkena!kan PC-nya
sehingga
isti!ab CAI
me
sema!d.11
populer.
6
|
|
Menumt
Chambers
dan Sprecher
(1983,
p6) perangkat
berbasis
komputer
muncu! dari
sejumlah
disiplin
ilmu.
Dari
matemat
muncul
program-progra1n
membuat
semuanya
menjadi
!
bermaTtfaat.
Sedangkan
dari
ilmu
psikologi
muncul
pengetah
mengenai teori belajar, teknik. be!ajar
dan
motivasinya.
:U.l.2 Pengerthm CAI
Menumt
Kearsle-<f
(1983,
pl
),
adalah cara belajar
yang
a
pengj:;"ll!lll. hams
melakulam
sesuatu socara berkesinamb
'lgan,
sep
menjawab
pertanyaan,
memiiih
topik,
bertanya
atau
meng_kaji ulang
sebagainya. Sedangkan
menurut
Schall (1986, pl90), CAT
meng
kepada
penggunaan komputer
sebagai aiat
bantu dalam
proses
bela
mengll:lar.
Menun.rt
dan
Korostotf
984,
ppl
16), CAI
ad
prograrn
yang
digunakan
menyed.iak&'1
latihan
mengajaL.
mengulang
atau
siswa
sehingga
dapat
menlngkat
penguasaaan siswa terhadap
materi yang
telah
diajarkan
|
 Menurut
Ysewijn
(1992,
p5)
ada
tahap
pembuatan
perangkat
yaitu:
®
Taha.p Konsepsi
Pada
pemncang
melalmkan
pengamatan
dan studi kelaya
dengan
menggnnakan
dan
kertas
menuang
ldenya
merancang pera_?tg_lcat
ajar.
.,
Tahap Re alisa1>
Da!am tahap
perancang
menuangka.'l kc>nsep yang telah
di.ran
Dalam
tahap
menggunakan
kedua
tahap
diat.as
u
membandingkan
dan menguji antara
tujuan
yang
diharapkan
den
hasii yang telah
dicapai
untuk
mengurangi
kesala,han-kesalahan
y
mungkin timl:r.Jl se:sm:lalm
ra.
$
Drill and
_j_"Dractice
JePis
ini
menitikberatkan pada
pelatihan
yang bernpa
evaluasi
bel
r.lisa.lnya
mengqji
kemampnan user
me!aiui
latihan
be!ajar
kesalahan. Cara
mula-mula
dit&"T.pilkan suatu
pertany
kemudian user
akan m<lm.berikan jawaban
Jawaban
dita,'ll
|
 akau
dievaluasi,
U
·"
JJ
'
'n'u•
u
'--·
k
an
H
dertga
kemudian
menampi
initiative". Socraric berasal dari
penelitian
dalam
bidang
y
pertanyaan berikutnya.
"
Tutorial
!\fenumt
Ysewijn(1992,
p
10), jenls
pengajaran
adalah
pa
lengkap
dan
digunakan
sebab yang dit;!lm]piU:an
terl
dahulu ada!ah
per,gajarau
da11
kemudian
diakhiri den
evalaasl helajar.
@
Test
Dasar pembuatan
test
sangat
luas,
tergantung strategi
dipilih
metoda
yang
dipakai
sesuai
dengan
ti.pe
pertanyaan.
Pemili
strategi dan
metoda
sangat
mempengamhi
pemilihan pertanylll!m
penentuan
ni!ai
serta
mekanisme
umpan
b
Sedangkan
mempengaruhi
mated
presentasi
tampilan
!ayar.
111
Simulasi
SimJlasi yang
berorientasikan
CAI memiliki beberapa
karakteri
dari kecerdasan buatan
berbasiskan
CM.
Dalam
simulasi terd
suatu usaha untuk
mtm;,rao:mi
k<" aan.
yang
sesunggulL"lya.
Socratic
Socratic
berisi percakapan
atau
dialog antara peserta pelatihan den
komputer
dalam
language_
Bih
peserta
pelatihan
komputer
dapat m<::ll}awab sebuah pertanyaan rnaka disebut
"mi
|
 multimedia
adal.ah
memerlukan penanganan
data se
dibandingkan
dengan
dunia pendidikan atau bk!ang CPJ
itu sen
So,cnictic juga ditujukan
untuk melakukan
dalam
nat
dan
tmtu.!;:
memahami
apa
yang
diinginkan
pes
berbasis
komputer yaitu
sebagai
berikut:
1.
User
Friendly,
ma.k.:sudnya dapat dengan
mudah
digunakan
2.
mudah dimengerti, misalnya
dengan adanya
h
dapat
diguna.l.::an pemakai
awal
untuk
membantu
da
menggunakan perangkat ajar.
3.
1
:..v
\ljjembutuillatn
wa,..¹_
'*
:
.u
b'
e
HlJar
·
yang rnL
·11·
lmum.
5. Dapat btTguna bagi sebagian
besar
kalangan
pemakal.
:VIenurut (1993, pi), multimedia adalah
s
peuggabunga.n antara atau
iebih media
dalam
suatu
apl
komputer.
menurut .'\.'tdleigh
dan
Thak:rar (1996,
|
 dinamis yang meacalrup
penggahungan
teks, suara, video dan anim
gambar.
Multimedia
.ruga
memungkir>J\:an
kita
untuk
mengguna
kombinasi
terbaik
dari
media
untuk
menampilkaJl
infom1asi
yang te
dengan situasi tertentu,
Sedangkar1
multimedia
adaiah
sistem
y
menggu.nru
'can
'be ih.
¹
satu
presentasi secara
bersamaan
melibatkan
keikutse1taan
pemakai
uu.tuk
memberi
perhrt
mengendalikan, dan
manipula$i.
Menumt
Andleigh dan
Tl1akrar
(!996,
pp33-35)
kompon
komponen
multimedia terdiri
dari:
*
Teks
(text)
Teks
adalah
tipe data
yang
palh;g
sederhana
me.merlukan tem
penyimpamEl yang
paling kedl.
Teks juga
sangat bergu.11a
m1
menyampaikan inforrnasi secara
!angsung kepada
user.
Sedangkan
Hypertext
adalah
aplikasi
da.-i
yang
menyedia
indeks untuk memungkinkan
pencar!Q'l
yang cepat
antara satu
sim
informasi
dal&'Il
dengan simpul
yang
la1rilya,
Gambar
(Image)
f"r<tiT'har (Image)
adalah
semua
obyek
yang
direpresentasikan
sec
visual dalam
hentuk
2
dimensi. atau 3 di'11ensi.
|
|
"
Suara (Audio)
(Audio)
dapat
cibagi rnenjadi beberapa kategori ya[tu rnu
pembicaraan manusia (t>peech) dan
etek
suara.
Untuk
dapat
membuat
suara ya11g
dapat
diterima
oleh teli
manuS:a. trekuensi s:uara haru.s dipertahankan antara
20-20.000
"
A,'Jimasi
Animasi
adalah
ilusi gera.l.um
yang
dihasilkan
o!eh penay&'1
gambar
diam
secara
berurutan
dengan
kecepatan
15-20 .frame
detik.
:U.3
Prototyping
2.1.3.1 Pengertian
Prototyping
MemrruPressr.:an (1997,
pp32-34)
prototyping
adalab su
o:n:.s;;s yang
memungkiEkan
developer
membuat
uatu
model
soft
Seorang developer
seri11.gkaH
tidak
mengetahui pasti efisiensi
dari
su
algoritma.
dan
penyesuaiannya
terhadap
sistem
operasi
se
ta
bagaim
bentuk
perancangan
yang
baik.
Dai.am
situasi
te;sebut
paradigma
prototyping
ma
memberikaa
pemecahan
yaJ1g
paling
baik.
Karena
den
mengembangkan
model
prololyping,
sistem
da:;::at
dikembangkan sec
ber::ahap
sehingga
me
nberikan
kepuasan
kepada pemakai
(us
dan
memungkinkan
untuk
pemeliharaan
JiUlgi<:a
panjang.
|
 2..L3.2
Tahap-taba.p Prototyping
<>
Tabap Pengumpdan Data
(Requirements Gathering)
Dala'n
tahap
ini
developer
mengumpu!kan data-data
untuk
dijadi
sebagai bahan
dasar dalam penyusuruu"J
prototype.
Pada tahap
ini
developer
merepresentasikan aspek-aspek
piranti !u
user
melalui
pendekatan input
dan format-fon
output
untt1k
menkonstruksikan prototype.
"
Iahap Evaluasi
Prototype
dihasilkan
akan
dievaluasLI.;an
o!eh
user
un
menyaring
kebutuhan-kebutuhan
bagi
pu·anti
luna<;:
y
tersebut
dilakukan
untuk
menyempurna
keperluan
piranti lunak.
®
Tahap Penyesuaian
Pmtotype
akan
d;sesuaikan
untuk
memberikan kepuasan
kepada
u
dan
memungkinkan untuk
pemeliharaan
jangka panjang.
F..nbung3n
antara
tahap-tahap
tersebut
dapat digambarkan
seba
berikut:
|
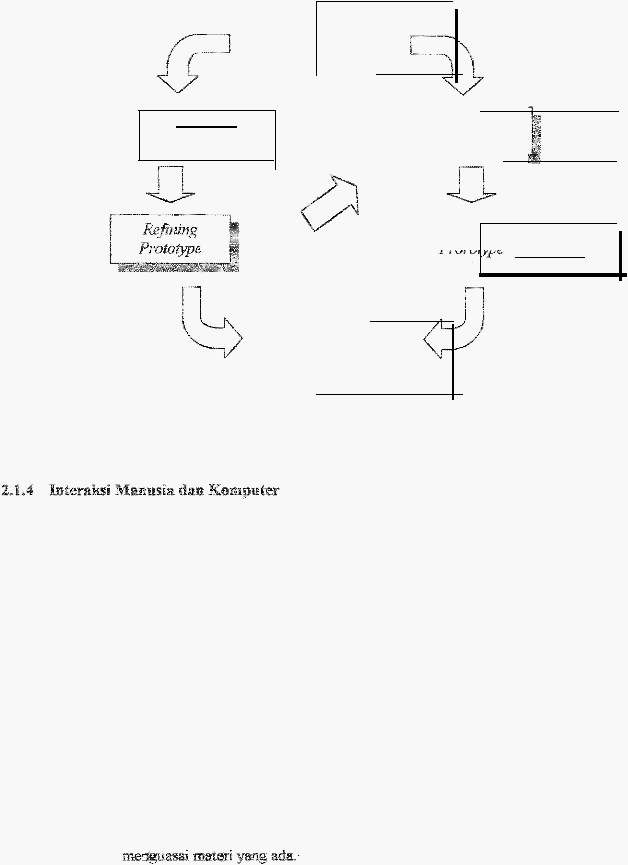 I
Product
Requirements
Gathering dan
Refinement
;--
Quick
Design
Building
n.
1
Customer
E:_aluation of
!
f'rototypmg
Gambar 2.1
Tahap-tahap Protot;ping
Pengeman Jnteraksi Manusia
da11
Komputer
!vfenuwt
Shneidennan
(1992,
pl5),
Interaksi
Manusia
Komputeadalah disiplin
yang
berhubungar:
dengan
penu>can
evaluas
implementasi
sistem komputer
mteraktif untuk diguna
oieh manusia.
Menumt
Sneiderman
(1992,
pplS-18),
piranti
1unak
yang b
dan
dapat
berinteraksi
dengan
pemakaiDya
(user friendly)
ha
memenuhi kriteria-kriteria sebagai berikut:
Waktu
be!ajar
singkat,
sehingga
pemakainya
lebih ce
|
|
Kecepatan penyajian informasi yang
tersedia adalah yang
pal
<::kurat
'!:>
Tingkat kesalahan pemakai
yang
reudah.
'!:>
Mudah dihafal sesuai jangka waktu
Kepuasa.'l
pemakai,
maksudnya setiap
pemaka.i dapat
meras
manfaat dari
ph:?Jlti
!ural.;: yang te!ah dibuat serta memsa puas.
2.1.4.2 Tujmm Rekayasa Sistern !nteraksi
M:umsia
Kmnputer
"'
Fungsi
yang
sesuai
Da!am
merancang
s1s1:em terlebih <:mltlUIU ha."Us
memastikan apa
y
hams
dilalrukan,
sebab jika
fungsi
tidak
sesuai
akan
mengeoow
user.
hal itu
terjadi maka
sistem
af',.an ditolak
atau t
di.<r®faatkan.
"
Keha11dalarr,
Ketersediaw
Keamanan"
dan
!ntegritas
Data
Sisrem yang dibuat
haruslah sesW!i
dengan apa yang diinginkan u
selah:siap ketilr..a
hen::iak
digunakan, serta terlindungi dari akses ya
tidak diingi'lkan
kerusakan
yat-:g
disengaja
sehingga keutu
selalu terjamin.
Standarisasi, Integrasi, Konsistensi. dan Portability
Suatu
sistem
yang
baik
harus
mempunyai
keseragarrum
s
antamiuka
pemakai
dengan
aplikasi-apli.lcasi yang
berbeda
keseragan1an
dalam
suatu
program
aplikasi seperti wama,
nru
perintah
lain-lain. Berbaga.i aplikasi
yang
herbeda dan
sojt,
|
|
tool hams me:Jjadi
satu
kesat,ran. Suatu sistem
menmngkinkan data dipindahkan
baik hams da
.,
Penjadwalan
An
garan
Penjadwal.an
diperlnkan
karena
sistem
harus
selesai tepat
p
wak:tunya. Karena adanya
persaingan
maka
sistem
diusahakan tid
mengel:uarkan biaya yang besaL
Menurut David
Bell
Grimson
(1992,
pl5) database
diga.mbar
sebagai sebuah
tempat untuk
menyimpan data-data, dima.'la data tersebut da
digunaka.'1
dan dimasukkan
lagi
sesuai
dengan
kebutuhan.
Sedangkan
menumt
McLeod
(1996,
p324)
database a&lah
suatu kole
data komputer yang terintegrasi , diorganisasikan dan disimpan dalam suatu
c
yang memudahka:n pengambilan kembali"
Tujuan
penggunaan
database adalah
mengur&lgi
pengulangan da
untuk
mempercepat proses
pengambilan data
at
inforrrllsi
mening,\at
keamanan, serta
memungki.nkan data
ata.u
inforrnasi ditambar, diubah,
dihapus.
Sistem Pengenalan Suara
dan
Sintesis Smmll
2, L6.l
Sistem :Pengenalan Suara.
Sislem
pengeP.a!an
suara
memungkinkan
komputer
da
mendengarkan
suara user dan
menentukan apa yang dikatak?..n
oleh us
Sistem
da:pat
berkisar dari
penger,alan perintah diskrit
sa."'!lpai
di
|
|
berkesinambungan.
Walaupun
sistem
pengenalan
suam
telah
berkem
pesat
dalam
beberapa
tahun
terakhir
ini,
masili
banyak
sistem ini
y
mempunyai tingkat
kesalahan
Kesa!ahan
dapat
dikurangi
dengan
menggunakan
mikro
yang
iebih
baik.
mengarangi
suara-suara
yang
mengganggu
membatasi
tugas
sistem pengenaJan
suara.
.6.2 Slstm Sintesis Suara
Sistem
sintesis
suara
adalah
kebalikan dari sistem
pengena
suara.
Sistem
ini memungkinkan
komputer
menghasilkan
ke!ua
bempa suara.
Sistem
dapat menerima
masukan
berupa
teks
mengeluarkan
kelua:rcJ:l berupa
suara
manusia,
menjarlikan
sistem
sint
suara bertindak sebagai aplikasi text-to-speech.
Sistem
hams
memenuhi
dua
pe:rsyaratan,
yaitu
da
dimengerti
dengan
baik
dapat mengeluarka.'l
suara dengan ala
Suara yang
a!a.T.i
dapat
ditingkatka.n
dengan menggunakan
suara
n
mekanis
dan
pengaturan
tekanan,
intonasi
dan
frase.
Sintesis
suara
j
hams
menduk:tmg
atribut
suara
keluaran,
misalnya dapat
memilih
!m
\Vanita atau
atau dapat
memilili
tingkat rmda
suara.
Dala1n
Perangkat
Transfurmasi
Geometri, sistem
pengena
sua:ra
dan
sistem
sintesis
su.am
telah
dikemas
dalam
perang
pengembangan
?viicrosoft Agent.
ilicrosoft Agent memanfaatkan fu
fungsi
yang
disediakan
Microsoft
Speech API untuk menerap
sistetn
tersebut.
S<:-da.ngkan
sebagai
speech
engine,
rlibutuh
|
 komponen
pendukung
da_ri
IBM
Via Voice. Speech engine
adaiah
su
komponen
ba_IJasa
te1iC"!!tu.
meiiputi sistem. pendt!kuP,g aplikasi
suara untuk
su
2.1.7
Diagram Tnmsisi!State
Transition Diagram (STD)
JY'remtrut Edward
Yourdon
(1989,
pp259-260)
Diagram
tra
mempakan
suatu
alat
bantu
perancangan
yang
menggambarkan
s
ketergantungan pada waktu dari
suatu sistem
N01tasi Diagram Transisi
Komponen-komponen
utr::na
yang
digunakan
daiam
diagram
tra
adalah:
"' Keadaan Sistem
(System State)
Digarnbarkan
dengan
sebuah
kotak
perseg1
panjang,
y
menyatakan
keadaan
sistem.
Salah satu contoh
keadaan
sistem
ada
menuagggu
pengguna mema:mkkan
password.
·Notasinya :
Gambar
22
Simbol
State
@
Pemhahsn
Kea.daan
(Change of
State)
Pembahan.
keadaan
digambarkan
dengru::
garis
pana.'l
y
menglmbungkan
dua
keadaan
yang berkaitan.
Nota.sinya:
Gambar 2.3
Perpindahan
State
|
 "'
Kondisi
dan
Aksi
(Condition
a11d Action}
Untuk
melengkapi
STD, diperbke.n
dua
komponen
tambahan
ya
kondisi
dan
aksi.
Kondisi
merupakan
penyebab
suatu
kead
merJadi
bembah
sedangkan
aksi
adalah yang
dila'L""Ukan oleh
sist
bila terjadi
perubahan
keadaan.
Notasinya:
Kondisi
Aksi
Gambar
2.4
Kondisi
dan
Aksi
2.2
1'eori-teori
Klmsu!!
2.2.l..i
Translasi
(Trmnsiatim1)
Translasi a<'.alah suatu
transformasi
yang
memindahkan
tiap t
pada
objek
sesuai
dengan
jarak
dan
arah
tertentu.
Yang diwakili o
pasangan
'
o
u
.•
an.gan
t
emm
t
Cara
ya,<g
digunakan
un
memranstasikan
suatu
objek
adalah
sebagai
berikut:
1. Ter.tukan
seberapa.
janh
titik
pada objek alum
dipindah
seara.h Stimbu x.
2.
Tentuka.."l
seberapa jauh
titik pada
objek akan
dipindah
searah sumbu
y.
Perlu
diingat,
bahwa
translasi tidak mengubah
bentuk
ukunm
tetapi
hru'1ya
memindahkan letak
suatu
objek
|
 ('1l\
"'
'
...
"'1
;
4
=!1
'"'
'
\
b
i
,.
'
/
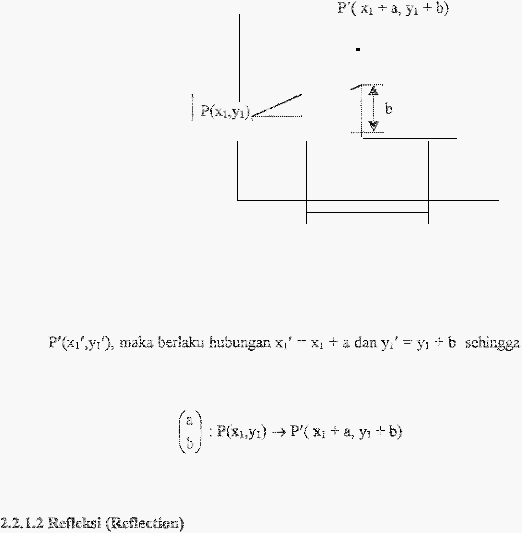
Gambar 2.5
Translasi
Jika
trauslasi
T
(a'\
i
i
menetakan titik
P(Xt,Y¹)
ke t
b)
"
hubungan
dapat
ditcliskan
sebagai
berik-ut
:
T=
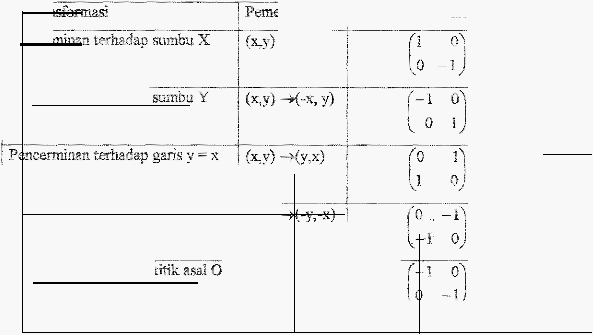
Refteksi
adalah
>llatu trai1sforma:;i yang
memindahkan
tiap
t
pacta
objek dengan
menggunakau
sifat
bay<LTJgan eemrin. Cara
y
digunakan
untuk
mencermin!c.an suatu objek adalah sebagai berikut:
l.
Tentuka.'1
garis yang
bertindak
sebagai
sumbu
cermill
atau
su
sL-r:etri.
2.
Buatlah
tega_l< lur..!S
pada
sumbu
ce1min.
|
 3. Perlu
diingat, bahwa
jarak antara
sumbu
cermin dengan
tiap
titik p
bayangan
hams
sama dengan
jarak antara
sumbu
cermin dengax:
titik pada objek.
Bedkut
adalah romus pemetaan
dan
matriks
yang
dapat
diguna
untuk memperoleh posisi benda
setelah
dicerminkan:
yang
->(x,-y)
terhadap
Pencermirwn terhadap garis
y
=
-x
(x,y)
(x,y) (-x,-y)
Tabel
Refleksi
2.2.L3
au''""'
(Rotation)
Rotasi
adalah transformasi
yang
memutar
tiap
titik
pada ob
sesuai dengan
besar
sudut dan arah
sudut
rotasi
tertentu.
Terdapat
arah perputaran
dalam
rotasi
yaitu
rotasi
yang
berlawanan dengan
a
putar jamm
jam
(arah
posit;f) dan
jamm jarn
(amh negatit).
yang searah
dengan
arah
p
|
 Cara yang
diganakan untuk
merotasikan
suatu
objek ada
sebagai berikut:
l
.
Temukan titik pusat rotasi.
2.
Tento.Lkan
besar sudut rotasi.
"'.
Tentukan arah sudut rotasi.
Terda.pat dua
buah
jenis
pencermin<tn yaitu:
L
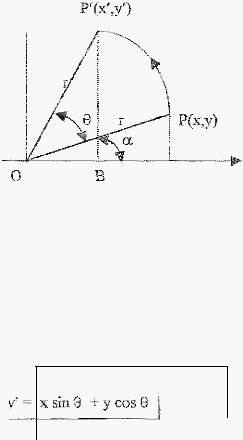
Rotasi Terhadap
Pusat 0(0,0)
y
I
A
Gamber 2.6 Rotasi Terhadap Titik
0(0,0)
Jika
Titik
P(x;y)
akan
diputar
sebesar B radian
sesuai
dengan
a
putar terhadap titL\ pusat 0(0,0)
maka akan berlaku hubungan seba
be1ikut:
xf
-x_ cos
e
-
y
sin
9
|
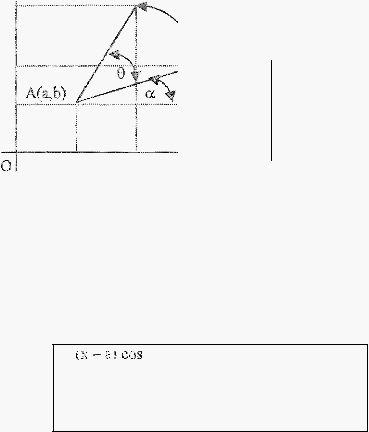 Rota.si
Ter!ladap Titik
Pusat
A(
a,b)
y
P'(x',y')
P(x,y)
Gambar 2.7
Rotasi
Terhadap Titik A(a,b)
Titik
P(x,y) akan diputar sebesar 8 radian
sesuai
dengan a
terhadap
tiiik
pusa.t A(a,b)
maka J;an
berlaku hubu
sebagai
berikut:
e
-
(y-
e
y' -
b
(x- a) sine (y-
b) cos
e
Berikut
adalah
m.rnus
pemetaan dan
matriks
y<mg
dapat
diglll1a
untuk
memperoleh posisi
benda setel!ili
dirotasikan:
|
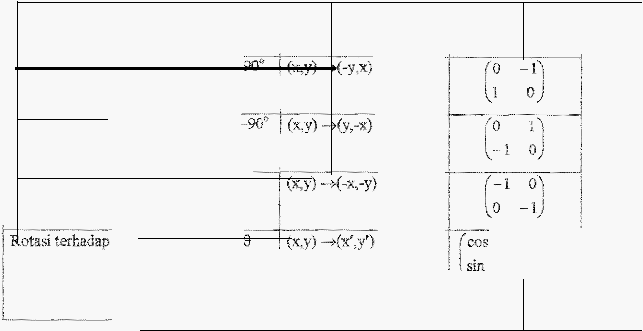 Tra.nsformasi
Pemetaan
Matriks yan
bersesuail
terhadap
asa!O
Rotasi terhadap titik asal
0
sebcsar
Rotasi terhadap
titik
0
sebesar
n:
asal 0
sebesar
x'= xcose-
y
e
-sin
e
8
CO&
y' =
X
sin
8
+
y
COS
8
Iabe!
Rotasi
2.2JA
lHlat3sl (Sealing)
Dilatasi adalah
suattl
transformasi
yang
mengubah
ukuran
;,u
objek, tetapi tidak mengubah
bentuk objek tersebut. Terdapat dua ben
dilatasi
yartu
memperbesar
dan
mernperkecil objek
ditentukan oleh p
dilatasi
faktor
skala.
Cara
yang
digunaka;·l
untuk
mendilatasikan
suatu
objek
ad
sebagai berikut:
l.
Tentuk J1 pusat
di!atas!.
2.
Temukan
faktcr dilatasi atau faktor skala k.
3.
Dalam dilatasi terdapat empat
hal
yang
perlu
diingat,
yaitu:
.
nilai
k
>
1,
maka
bayangan
diperbesar
dan
terletak
sepi
terhadap
pusat
dilatasi
dan
posisi ob}ek
semula.
Jika
nilai O<
|
 maka bayangan
diperkecil dan
terletak sepihak
ttorhadap pu
di!atasi
dan
poslS!
objek
semula.
Jika
rillai
-I <k<O,
m
bayangan
diperkeci!
terletak
berl8Jnan
pihak
terhadap p
dilatasi
dar,
posisi objek
semu:a. Dan
jika
nilai k<-l
m
bayangan
diperbesar
dan terletak
berll:inan pihak terhadap pu
dilatasi dan posisi objek mula-n1ula.
Berdasarkatitik
pusat
maka di!atasi
dibagi
menjadi dua yaitu:
1.
Dilatasi terhadap
Pusat
C(O,O)
jika
titik
P(x,y)
didi!atasikan terhadap
titik
pusai
0(0,0)
den
faktor
skala k
maka dipem!eh bayangan titik
P'(x1',y1
')
sehin
berlak'll hubungan
sebagai
berikut:
;
k:x
=
!
I
y
ky
I
L..
"
J
Sehingga dapat dinyatakan bahwa:
P(x,y) -•
P(kx,k-y)
adalah matriks yang sesuai dengan hubungan diatas:
(k
lo
|
 y
P(x,y)
Garnbar
2.8
Di!atasi
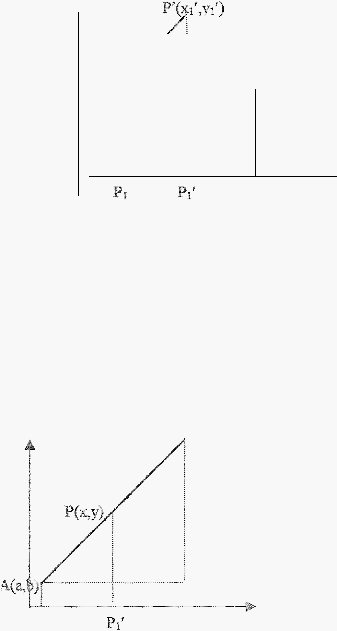
2.
Di]atasi te!"t.adap Titik Pusat A(a b)
Sedangka:n
jika titik
P(x,y)
didilatasi
terhadap
titik pusat A(
dengan faktor skaia
k
maka diperoleh bayangan titik
P'(x1
',y1
').
P'(
'
x
'1
'Y
)
•''J
"
OAr
X
(Jambar
Dilatasi
Dengan memperhatiic.an gambar
diatas
maka
dapat
disimpul
bahwa
untuk
menghitung
bayangan
titik
P
akan
digunakan ru
beriln1t iPJ:
|
 !
X
l
,
'
I
y·
.
=
.
::>
+
.
K
(
y-
b)
Gusuran
(Shearing)
adalah transformasi
yang mengubah
ben
suatu objek tanpa
mengubah luas
cbjek tersebut dalam satu arah.
Cam yang digunakan
untuk
mencerminkan
suatu objek adalah seba
berikut:
l.
Tentukan
titik
pada
objek
yang
ingin
dipetakan
den
transfonnasi gusuran.
2.
Tentukan
arah
gu"'uran. apa.kah
searah
sumhu x atau
y.
3.
Tentuka.."l
faktor
gusuran atau faktor skala
(k).
Transformasi gusun:m dapat dibagi
menjadi dna
yaitu:
1.
Transfmmasi
gusuran
searnh sumbu
X
(sumbu
sebagai
g
invarian) dengan
fuktor skala k
memetakan titik
P(x,y) men,jadi
P'(x1
',y,')
yang
ditentukan oleh
persarnaan
:
/
r\
(1
k] (x'\
!
:
.
io
I
,
VI
'
\Y')
1
)
'
\... j
Sehingga
dapat disimpulkan
bahwa
matriks
yang sesuai den
transformasi lEi adaiah:
--·--,
I
i
I
:1
k\
\
\
lO
l)
i
L_
..-.-J
|
|
(1
'
\Y
Sedangka_n dengai1
c<:ra pemetaan ad;;Jah
sebagai
berikut:
P(x,y)--* P'(x
+
y)
2.
Tnmsform.asi
gusuran
searah
sumbu
Y
(sumbu
Y
scbagai g
invarian) dengan faktor
skala k
memetakan
tiri:.lc
P(x,y)
men
F'(x(yr') yang ditentukan oleh
persamaan :
I
t
x'\
O\
rx)
I
v'
!
=
j
l
I
l
'
'"
ik
/
'·
/
SePjngga
dapat
disimpulkan.
bahwa
matriks
ya11g
sesuai den
transformasi ini
adalah:
r-
-
I
o!!
l
k
lJ
I
t-....-.---- --
--1
Sedangkan
dengan
cam
pemetaan
adalah sebagai berikut:
P(x,y) _,.
P'(x,
kx-.-
y}
Regangan
(Stretcht'ng)
adalah
transformasi
yang
memperb
ukuran
suatu
objek
dalam
sai:u.
arah.
Cara yang
digu..'1akan un
mencenninkan
suatu
objek
adalah sebagai
berikut:
l
Tentukarr
titik
pada
objek
yang
i11gin
dipetakan
den
transfo:rmasi regangano
2.
Tentukan arah
regangan,
apakah searah sumbu x atau
y.
3.
Tentukan
fakcor rega_'lgan
atau faktor skala (k).
|
 -
io
k!
:
I -
I
I
'
I
I
T
ransformasi
regangan dapat
dibagi
menjac!i
dua
yairu:
1.
Transformasi
regangan
searah
sumbu
X
(sumbu
Y
sebagai
g
invarian) dengan faktor skala
k
memetakan titik P(x,y)
mer;
P'(x1',y{) yang ditentuken oleh
persa.rP a!1:
rx'\
(k
o\
fx\
I
l
---
I
I
-
I
1
v-' I
lo
l
j
1
:
\..<
J
'-
J
\,.Y
j
Sehingga
dapat disimpulkan bahwa
matriks yang
sesual
den
transformasi
ini
adalah:
,-------.
!
(k
o1
j
I I
0
1
I •
;
"
j
I
-'
----------'
Sedangkan dengan c-ara pen1etaan ada!al1
sebagai
berik>Jt:
P(x,y) -• P'(kx,
y)
2.
Transfbrmasi
regangan
searah
sumbu
Y (sumbu X
sebagai g
invarian)
dengan
fuktor
skala
k
m.emetakan
titik
P(x,y)
men
P'(x{,yt') yang ditentukan oleh
persamaa:n:
(y'\
,,
o'l
(x
I
,
I
'
<.Y
j
'
)
\,YJ
Sei'Jngga
dapat
:lisimpulkan bahwa matrik.s
yang
sesuai
den
transformasi
ini
ada!ah:
Seda11gkan d.engan cara pemetaa11 adalah sebagai
berikut:
P(x,y) -'+
P'(x, ley)
|
 Komposisi Tnmsformasi
Komposisi
tmnsfonnasi
adaiah pengerJaan
dua atau
lebih transfon
secara
berumta!L
Misalkan
r)
adalah
SU<i!U
transformasi
Y"ng
memetakan titik
P(x,y)
t
transformasi T:
titik P'(x1',y¹
')
dipeta.lcan ke t
Dua
fransiasi
Berurutan
adaJah
suatu
tra11storrr.asi
y
melakukan du2 traru;lasi
dengan dua
jarak dan arah yang berbeda.
translasi
1'.,
,....
Aau
'f
,.,
mas
m
·
g-m.astug dinyatakan
·
de
pasangan
bilangan
berurutan
den
1
I'
a1
'
bz );
maka komposisi
trans
dapat
diwakili oleh sebuah traru;lasi
tungga!yaitu
dengan
menggunakan
cara belikut
|
 a
'
·.
;
c
1
=I
i
A'(x
+a,
y
+b)-·
\d)--+A"(x
+a+
c,y
+
b+ d)
Komposisi
translasi T 1
o
T2
akan
memberikan pemetaan
bayan
yang
sama
cengan komposisi transiasi
T2 o
Tl
karena komposisi
translasi
bersifut komutatif
2.2.3.2 Komposisi Dua Re:fleksi Berum.t:am
pad.a
SumiJu Se.iajar
Dua
Refle!-
i
BenJ.rutan
pada
Sumbu
Sejajar
adalah
:
transforma.si
yang
melakukan
dua
refleksi
terhadap
dua
sumbu y
1.
I>encerminan terhadap
dm.
sumbu
yang sejajar terhadap
sumbu X
Jika
ritik
P(x,y)
dicerminkan terhadap
y
a
dan
dilaPJut
dengan
pencerminan terhadap. garis y
=
b
(b
>
a)
maka bayan
akhir
,y") dapat
ditentukan
sebagai berikut:
Mu!a-muia
P(x,y)
dicermi'lkan
terhadap y
·a,
didapat:
P(x,y)
P'(x,
-
y)
,.
Kemudi.an
titik
P'(x,
2a -
y)
dicenninkan terhadap
garis
y
didapat:
P'(x,
-v)
·'
P"(x, 2('J-a)
|
 P(x
Hubungan diatas dapat
dituliskan dalam bentuk
berikut
ini:
P(x,y)
Seba!ilc.nya
P(x,y)
dicerminkan
terhadap
garis
y
b terle
dahulu,
kemudian
diccrminka:1 terhadap
garis y "' a malea d3pat
ditulisJr,lill
dalam bentuk
berikut
vi
' .J
J
-------'3>
P"(x, 2(a-b)
+y)
2. Pencerminlln terhadap
dua
sumbu
sejajar
terhadap
sumbu Y
titik
P(x,y)
dicermidcan
ter!-,adap garis x
=
m dan
di!aJutle
dengan
pencennimm
terhadap
garis
x
=
n
(n
> m)
malea bayan
dapat ditentulean sebagal berikut:
"'
Mula-mula titik
P(x,y)
dicerwinlean
terhadap x
=
m, didapat:
P(x,y)
"
Kemudian
P'(2rr;-x,
y)
dicenninkan
terhadap
g
v=
didapat:
P"(2(n-m) +
x,
y)
Hubungan
diatas dapat
dituliskan dalam bentuk
berikut
ini:
P"(2(n-m}
|
 Sebaiiknya
jika P(x,y) dicerminkar; terhadap gans
x
=
n
ter!e
dahuh.L
kemudian
dicenninkan terhadap garis
x
=
m malm
da
dituliskan
dala'll
bentuk
berikut
ini:
Sehingga
dapat
disimpulkan bahwa
komposisi pencennin
1\'h
o
Ivh
akan
memberikan pemetaan bayangan yang tidak sama de
kompGsisi
translasi
o M, karena komposisi dua
translasi bersifat t
kcmutatif
:t2.3.
.l
Komposisi D<a Ref!eksi Berurutlm pada Sumbu
Tegak Lurus
Dua
Refleksi
Bcrurutan
pada
Sumbu
Tegak
Lurus
adaiah
s
transformasi
yang
melakukan
dua
refleksi terhadap
dua sumbu yang
saling te
lums
l.
Jika
litik P(a,b)
dicerwinkan
terhadap
sumbu
X
diperoieh
bayangan
P'(a,
Kemudian titik
P'(a,-b) dicerminkan terhadap sumbu
dipemleh
bayan
ru
k
t
'1.
1f
p'·
\®-a,-
o
'
_.
P
emet
.
aan
dapat
ditu!is dengan:
X(a,b) -'
'(a,-b)
Y(a.,b) 'f'(-a,b)
Y
vX(a,b) -)-
( a,-b)
j
Yo X (a,b)
-+(-a,-b)J
2.
Jika titik
P(a,b)
dicerrrxinkan
terhadap
surnbu Y
dipero1eh bayangan
P'(-a
Kemudian
titik
P'(-a,b)
dicerminkan
terhadap
sumbu
X
dipem!eh
baya
akhir P"(-a,-b).
Pemetaan
dapat ditulis dengan:
|
 I
r
i 1
ll
/
b)··· Y'( a.b)
X(a,b)-' X'(a, b)
oY(a,b)-> (--a,-b)
Sehingga
dapat
disimpulkan bahwa:
YoX(a,b)=
oY(a,b)
Yang
menlliJ.jukk&"l
bahwa
pengerjaan
dua pencerminan terhadap sumbu
dan sumbu Y se<:ara berurutan bersifat komutatif
2.2.3.4 Komposisi
Refleksi Bemrnl:lm
pada. Sum!:m Berpotnngan
Dua
Refleksi
Berurutan
pada
Sumbu
Berpotongan
adalah
s
tmnsformasi
me!akukan dua
reflekl!i
terhadap dua sumbu ya,J.g
sal
berpotongan,
JiY.a
titik
R(
a,b)
dieerrnink:: J."1 terhadap sumhu
X
kemudian dicerrnin
terhadap
y
x,
maka
pemetaan.'1ya dapat
ditulis
sebagai berik-ut
.
Pemetaan:
R(a,b)- R'(a, b)
R{a,b) ':..::"· c:.' R' (-b, a)
R(a, b)
--1-
R"(-b,a}
lVIatriks:
fat\
/-
o \to
l
·';
!
I
lh
v
l
;
!
0
-I)\)
oJ
b;
titilc
R(a,b)
dicermid:an
terhadap
sumbu
y
=
x
kemu
dicerminkan terhadap X,
maka pemetaannya dapat ditulis sebagai berikut :
|
 Pemetaac"l:
R{a,b)
y-'
x"-·
4R'(-b,a)
R(a, b) --"--4 R' (a,-b)
R(a,b)->
(-b,a)
lvfatriks:
sumbu
yang
saling
berpoton
menghasilka11rotasi (perputaran) yang
bersifat
sebagai
berila;t:
l.
potong
kedua
sumbu
pencerminan
mempakan
pusat
perputara
2.
Besar
sudut perputaran
sama de1:
gan
dua
kali sudut antara ked
su:nbu pencemrinan.
3.
l'l.rah perputaran
sama
dengan
arah dari
sumbu pertamz. ke
su
kedua.
Dua Rotasi
Be:-umtan
Sumbu
Sepusat
adalah
suatu
transform
melakukan
dua
rotasi terhadap
sam pusat yang
sama.
Ada
berbagai
c
untuk
mengt'litung dua rotasi
berurut<L'1 pada
sumbu
sepusat yailu:
Jika
sebuah
P(x,y)
diputar beriawa.nan
dengan
arah jamm j
sebesar B1 dac"l
kemud.ian diputar lagi berlawanan
de.11gan
arah jarum jam
sebe
E):
maka
berlaku rumus berikut:
x
"
=
x
cos 1.
'1.
8
1r
8
2
.
-
y
Sfn
·1e1· e
.
2
)
|
 sebu.a.h titik P(x,y} diputar
searah
dengan
arah jarum jam sebesar
dan
kemudian diputar
iagi
searah
dengan arah jarum
jam
sebesar
maka berlal
rumus be.rlkut:
Jika
sebuah
titik P(x,y} diputar
berlawarum denga:1
arah
jarum
j
sebesar
81
dan
kemudian
diputar
lagi sear&'! dengan
arah
jarum
jam sebesar
maka
ber!aku
rumus
berikut:
x''
=X COS
(
8; -
)
-
y
Sll (
81
-
fh)
=x
(81-\h)+yoos(
-th)
Jika
ebuah
P(x,y)
dlputar
searah
dengan
arah jamm
jam sebesar
dan kemudian diputar
lagi
beriawanan dengan arah
jarum
jam
sebesar Eh maka
bedak1 rumus berLlmt:
x"
=
x
cos (
-\h
+
flz)-
y
sin
{...a;+
82)
=
x
sin (
-81
+th) +
y
cos
(
-l'h +
62)
Sehingga
dapat
disimpulkan
bahwa dua rotasi berturutan
yang
sepu
ekivalen
dengar1 sebuah
rotasi
sejauh
jurnl.J:lh masing-masing
rotasi
sem
terhadap pusat yang sama.
2.2A
l\!attcikxi
2.2.41 l\Ia.triks
.1 l\Ia.triks
Untuk
menghitung
koordinat
titik baya.tlgan
suatu titik da
digunabn
cara
pemetaar'
dan
carz.
pe ?hiiuP.gan
perkalian
matr
|
|
v)
i
X
f
ra
\
J \.
l'vfatriks-matriks yang
digunaklll!
ada!ah
matriks
yang
sesuai
dengan
je
transformasinya
masing-masing.
PA
bungllll antara matriks
dan
titik
yang akan ditr rmformasi
dapat
ditulis sebagai
berilmt :
(x'\
l
1./
I
\
J
r
x
'!
I
I
i
'v
Setelah
diia.'rukan.
perhitungan
perka!ian
m.atrik.s
rnaka
a
menghasilkan
koordinat
bayangannya.
Berikut
ini menunjiL!dtau
pro
perk?Jian matriks:
(
'\
/
b\
(x
l
-
I
di
I
l
I
yt
', j
c
I
\Y;
f
.
x•\
.
I
(
v ,J.
.
v
h
y
n\..
ly•)
•
I
cx+dy
(
)
Cntuk
mer,ghitw<g
komposisi
transformasi
berumtllll
JUga
da
digunr_k&"l
perkalilll!
mat1iks
yaitu
dengan
mengalikan
ter!ebih
dah
matliks-matriks
yang
sesuai. J;ka
1erdapat
dua
bua,\ matriks transforn
r
/
a
b\
(e
r\
berurutan
yaitu
Mz
=
i
!
d2n h=
J
:
m:aka
perkal
'
C
d!
\s
hi
J
)
kedua
matriks
trarrsforrnasi i.rri
rnenjadi:
(a
b(e
r')
(ae+bg
aJ
•.
+
bh
t
'
1
Ivh x
:vf2
=
I
) 1
.!
i
I
!c
d!ig
h)
t..ce+dg
cf
+dh)
Setelah
itt: kalikan
hasH perktH!Ill
kedua matriks
tersebut d
mgan
t
yang akan ditransformaaikan.
|
 Jika
titik
bayarrgan
diketahui
maka
untuk
mencari
koordi
transforrnasi
hams
menggunakan
perhitungan
rnatriks invers
seperti
ya
ditLL'>jukkan
di bawah
ini:
/
(a
ic
'
f
/
X
"
i
'
'j
'\y
-
/
1
(dc
det.A
l-c
Diw,ana :
det.
A
xd)-(bxc)
|