32
kontrol. Servo motor digerakkan dengan menggunakan Pulse Width
Modulation (PWM).
Servo
motor
akan mengecek
pulsa
setiap
20
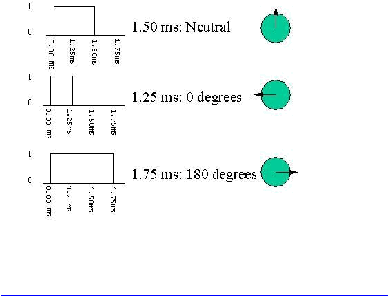
milisecond(0,2 detik). Panjang pulsa akan menentukan seberapa jauh motor
akan berputar. Contohnya, pada pulsa 1,5
milisecond akan membuat
motor
berputar sejauh 90° (lebih sering disebut posisi netral). Jika pulsa lebih
pendek
dari
1,5
milisecond,
maka
motor
akan berputar lebih dekat ke 0°.
Jika lebih panjang dari 1,5ms, maka akan berputar mendekati 180°.
Gambar 2.16 Pergerakan servo motor
Dari gambar diatas, durasi pulsa menentukan sudut dari batang output.
2.2.3.2.
Kontrol Motor
Kontrol Robot Loop Terbuka
Diagram kontrol loop terbuka pada sistem robot dapat dinyatakan
dalam gambar berikut ini.