42
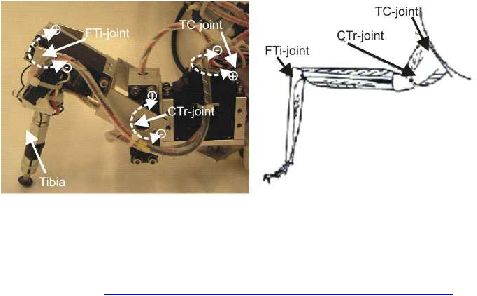
Aplikasi bentuk tungkai belalang pada robot Hexapod:
Gambar 2.23 Perbandingan kaki robot dan kaki serangga
2.3.1.
Gait
Gait merupakan pola pergerakan sendi hewan, termasuk manusia, saat
bergerak
melewati
zat
padat.
Gait
pada
hewan
harus
sesuai
dengan
kecepatan, kondisi habitat, pergerakan (maneuver),
dan
pemakaian
energi
yang efisien.
Bagi robot berkaki, terdapat 3 pilihan, yaitu gait
dengan 2 kaki (Bipedal), 4
kaki (Quadpod), atau 6 kaki (Hexapod).