18
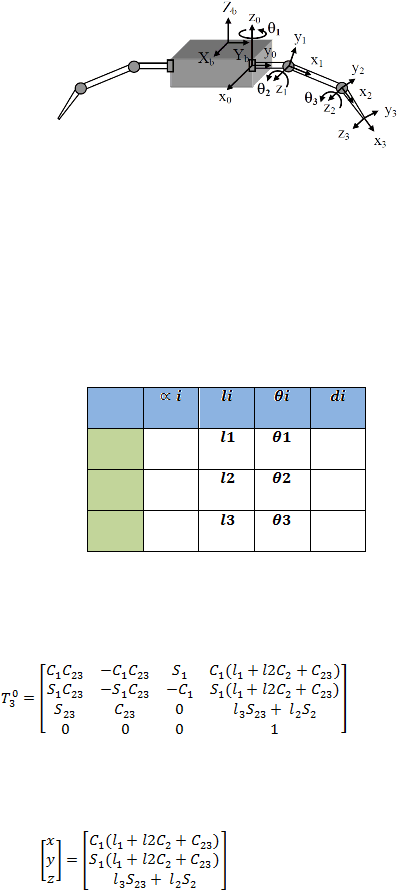
Gambar 2.12 Konstruksi Kaki
Gambar 2 merupakan bentuk model dari kaki robot, Z0 adalah base frame
dari kaki, 0 sedangkan Zb adalah framepusat dari robot yang terletak di tengah
tengah badan. Parameter dari kaki robot ditunjukkan oleh Tabel 2.1
Tabel 2.1. Parameter D-H kaki robot
Link
1
-90
0
2
0
0
3
0
0
Hasil dari transformasi matrik antara ujung kaki dengan base frame Z0 adalah
sebagai berikut:
.............(1)
Dari matrik T diatas maka persamaan forward kinematic dari kaki 3DOF ini adalah
..........................................(2)