6
dianjurkan untuk operasi terdaftar sebagai: START, STOP, MAJU,
MUNDUR, KANAN, KIRI, TUTUP, BUKA.
Abdullah dan Awal. (2011)
Robotics Institute of America
(RIA)
mendefinisikan robot sebagai reprogrammable manipulator multifungsi yang
dirancang untuk memindahkan material, suku cadang, peralatan, atau
perangkat khusus melalui
gerakan yang diprogram untuk
variabel kinerja
berbagai tugas.
RIA membagi robot menjadi empat kelas yaitu
perangkat
yang memanipulasi objek dengan kontrol manual, perangkat otomatis yang
memanipulasi objek dengan siklus yang telah ditentukan, robot diprogram
dan servis dikontrol dengan terus-menerus secara point-to-point
lintasan, dan
robot jenis terakhir ini yang juga memperoleh informasi dari lingkungan dan
bergerak cerdas dalam merespon.
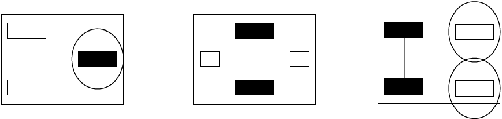
2.1.1 Mobile Robot
Gambar 2.1 Mobile Robot
Menurut Thomas Braunl (2008, p5) Mobile
robot merupakan robot
yang dapat bergerak menggunakan roda atau kaki.
Pada gambar 2.1 robot
beroda yang paling kiri adalah robot dengan roda yang paling dasar. Robot
tersebut digerakkan oleh sebuah roda paling depan yang berfungsi sebagai
penggerak dan penentu arah. Keunggulannya adalah robot tersebut memiliki
dua sistem motor yang berbeda untuk penggerak dan penentu arah. Kerugian
yang dimiliki adalah robot tersebut tidak dapat berputar pada satu titik karena
roda penggerak tidak terletak di tengah robot.
Robot yang terletak di tengah pada gambar disebut robot differential
drive
merupakan salah satu yang paling umum digunakan dalam desain