7
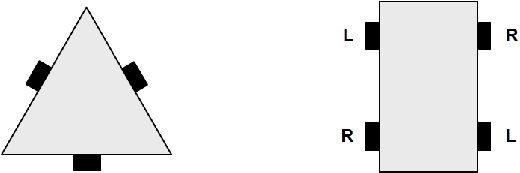
mobile robot. Kombinasi dua roda pendorong pada robot ini memungkinkan
robot untuk bergerak lurus, berbelok, dan berputar pada satu titik.
Robot yang terletak di bagian paling kanan pada gambar disebut robot
Ackermann Steering yang menggunakan satu motor untuk menggerakkan
kedua roda belakang dan satu motor untuk mengendalikan arah pada dua roda
depan. Semua jenis robot pada gambar di desain sebagai robot yang
membutuhkan dua motor, satu motor untuk penggerak dan satu motor untuk
mengarahkan robot.
2.1.2
Omni Directional Robot
Gambar 2.2 3-wheel and 4-wheel omni-directional vehicles
Menurut Thomas Braunl (2008, p113-117) Omni directional
robot
adalah robot yang dapat bergerak ke segala arah. Berbeda dengan robot yang
dibahas sebelumnya yang hanya bisa begerak maju, berbelok, dan berputar
pada satu titik.
Robot omni directional
dapat melakukan gerakan
lebih
banyak yaitu bergerak maju atau mundur kesamping. Kunci dari omni
directional
adalah Mecanum wheels
atau roda mecanum. Desain roda
mecanum
sudah di kembangkan dan dipatenkan oleh Swedish company
Mecanum AB dengan Bengt Ilon pada 1973.
Roda mecanum memiliki
beberapa tipe yaitu roda dengan putaran 45 derajat dan 90 derajat.