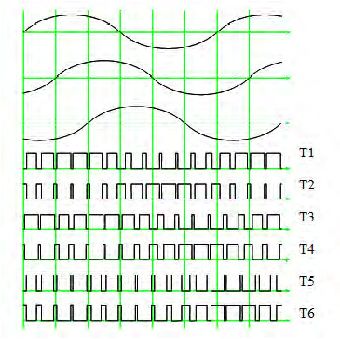
Dalam implementasi agar dapat mengendalikan keenam transistor pada driver,
sinyal PWM sinusoidal yang didapatkan dibagi menjadi 6 bagian atau step. Masing-
masing bagian atau step besarnya 60 derajat. Ini disebabkan karena perbedaan tiap fasa
dari sinyal 3 fasa adalah 120 derajat dan tiap 60 derajat terdapat gelombang sinusoidal
yang bepotongan dengan nilai 0. Oleh karena itu sinyal PWM harus dibagi menjadi 6
bagian untuk menunjang proses komutasi pada BLDC. Berikut ini implementasi dari
algoritma PWM sinussoidal.
[5]
Gambar 2.7 implementasi PWM Sinussoidal.
Sumber : Pengendalian motor brushless dgn metode pwm sinussoidal “Abe
Dharmawan FT UI 2009”
Kecepatan motor BLDC tergantung dari tegangan
yang diaplikasikan pada
kumparan. Metode PWM digunakan untuk mengendalikan kecepatan motor, sinyal PWM
diaplikasikan kesaklar S1 –S6 untuk menetukan rata-rata tegangan pada kumparan.
2.5. Driver Tiga Fasa.