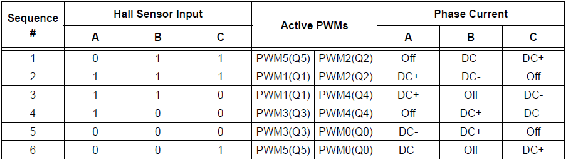
Tabel 2.2. Urutan langkah agar motor berputar berlawanan arah jarum jam.
2.6. Metode Pendeteksian Komutasi.
Agar BLDC dapat dikendalikan dengan baik (kecepatan dan torsi konstan),
diperlukan adanya timing
perubahan komutasi yang tepat. Apabila timing
perubahan
komutasi tidak tepat, motor BLDC akan mengalami slip.
Akibat adanya slip
adalah
kecepatan dan torsi motor tidak konstan. Hal ini tampak terutama pada saat motor
berputar pada kecepatan tinggi. Ketika terjadi slip,
kecepatan motor akan cenderung
turun dan memiliki kemungkinan motor berhenti berputar. Untuk menentukan timing
perubahan komutasi terdapat dua metode yang digunakan yakni metode sensorless
dan
dengan menggunakan sensor.
Metode sensorless dilakukan dengan cara mendeteksi BEMF dan zero crossing pada fasa
motor yang mengalami kondisi floating (hanya terdapat pada metode six-step), sedangkan
metode dengan menggunakan sensor adalah dengan menggunakan encoder
dan sensor
hall. Kedua metode ini memiliki kelebihan dan kelemahan. Pada metode sensorless,
metode ini tidak dapat digunakan pada kecepatan yang rendah. Hal ini terjadi karena
tenggangan yang diinduksikan pada kumparan yang tidak dialiri arus ( floating) nilainya
cukup kecil sehingga tidak dapat dideteksi selain itu metode ini tidak dapat digunakan
pada metode pengendalian sinusoidal karena pada metode ini tidak terdapat satu fasa pun
yang mengalami kondisi floating. Kelebihan dari metode ini adalah spesifikasi motor
secara fisik tidak diperlukan dan cenderung lebih murah karena tidak menggunakan alat
tambahan (sensor tambahan). Sedangkan penggunaan sensor memiliki kelebihan yakni
motor dapat berputar pada kecepatan yang rendah dan dapat
digunakan pada kedua