metode pengendalian yang ada. Kelemahan dari penggunaan sensor adalah fisik motor
diperlukan dalam menentukan posisi sensor dan cenderung lebih mahal.
[2]
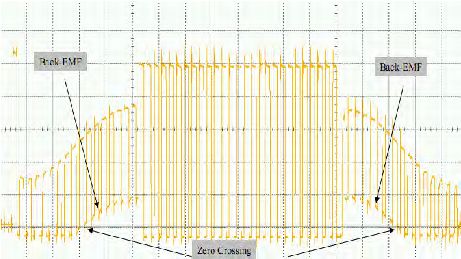
2.7. Back EMF dan Zero Crossing.
Pendeteksian dengan menggunakan BEMF (Back EMF) dan Zero Crossing
dilakukan dengan cara mendeteksi tegangan yang timbul akibat induksi magnet rotor
pada salah satu kumparan stator yang dalam kondisi Off. Kondisi Off merupakan kondisi
di mana suatu fasa tidak diaktifkan dan terja disetiap 60 derajat.
Gambar 2.8 BEMF dan Zero Crossing Pada Fasa Floating
Sumber : Pengendalian motor brushless dgn metode pwm sinussoidal “Abe
Dharmawan FT UI 2009”
2.8. Encoder
Encoder
sering dijumpai pada implementasi motor komersial. Hal ini terjadi
karena encoder
mampu memberikan timing
komutasi yang lebih tepat dibandingkan
dengan sensor hall dan lebih mudah diimplementasikan. Hanya saja encoder
memiliki
kelemahan yakni suatu encoder
tidak dapat digunakan untuk motor dengan jumlah pole
yang berbeda dan letak suatu kode komutasi pada encoder
harus dipresisikan dengan
letak pole
motor. Hal ini terjadi karena kode komutasi suatu encoder
hanya
dikondisikan untuk satu jenis motor dengan jumlah pole
tertentu dan apabila letak dari