36
_
r;
4
=
'
dz
..j(dx'
+
dy')
dz
B,
arctan-.=====
(dx² + dy²
j
Solusi
untukjoint 3 adalah
sebagai
berikut:
c
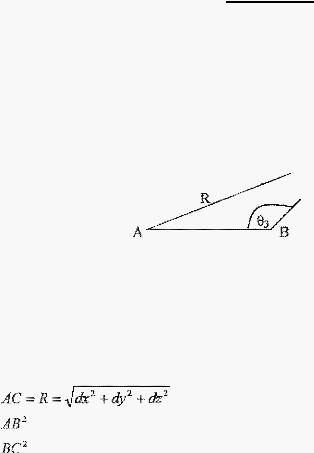
Gambar
2.25
Solusi
untuk
joint
3
Un:tuk mencari 9:; digunakan perbandingan antara
koordinat x , y, dan
z, serta
panjang
joint
dari lengan
robot
sehingga didapatkan:
L
L'3
+I'
4
AB
2
+BC' -R'
cost/ =------
3
2xABxBC
cost/.-
+L;
+L! -(dx'
+dy' +dz')
···························-
2xL2
x...
1
;L²,+L²
L' +L² +L² -(dx'
+dy' +dz')
(l,
arccos
2
3
4
I
2
2
2xL, x.._;L, +L
4
Ln =
panjang
link
ken
untukjoint 4 adalah
sebagai
berikut: