37
--:=....:. .''-----
Gambltt
2.26
Solusi
untukjoint 4
mn0
4
=----
sin²
2xoos01
xsinB, xcos(B2
+03
)
= mn-----
sin
-
-
'
--···············
-2xcosB1 xsinB1 xoos(612
+03
)
Link Parameters
Position & Orientation of
Endf
Joint Coordinates j
Link Parameters
+
'
J
..,,.
--]
inllrse KinematiGj".",.
,
Gambar
2.27
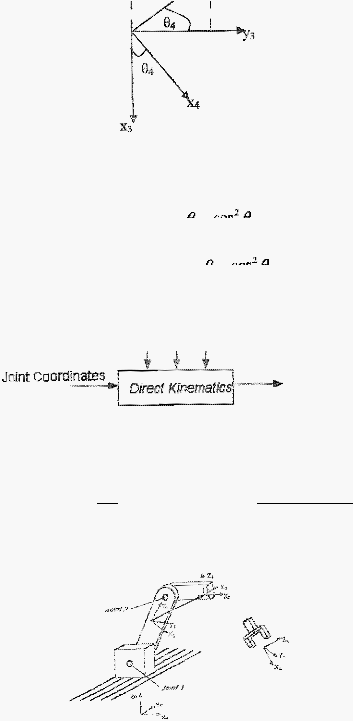
Direct
Kinematics dan
Inverse
Kinematics
Gambar
2.28
Links of a Kinematics chain