21
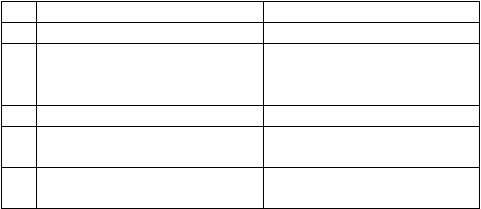
Tabel 2.1 Perbandingan antara robot beroda dan robot berkaki
No
Robot Beroda
Robot Berkaki
1
Relatif lebih murah
Relatif lebih mahal
2
Hanya dapat berjalan di
permukaan dengan roda yang
sesuai
Tidak perlu menyesuaikan kaki
dengan permukaan
3
Mudah dalam pembuatan
Pembuatannya lebih menantang
4
Hanya dapat berjalan di
permukaan halus
Dapat berjalan di permukaan
kasar maupun halus
5
Sudah relatif banyak riset yang
dilakukan untuk topik ini
Belum banyak riset mendalam
untuk topik ini
2.2.2. Robot Statis
Robot statis merupakan robot yang tidak dapat bergerak karena tidak
memiliki alat
gerak.
Robot
ini
memiliki area kerja
terbatas, karena tidak
memiliki
alat gerak untuk berpindah tempat.
2.2.3.
Motor Penggerak
2.2.3.1.
Pengertian Motor
Motor adalah sebuah motor elektris bertenaga AC (alternating current) atau
DC (direct
current), yang berperan sebagai bagian pelaksana dari perintah-
perintah
yang
diberikan
oleh
otak
robot.
Berdasarkan
fungsinya,
terdapat
beberapa
macam motor
yang
biasa
digunakan
pada
robot,
yaitu
motor
DC
untuk
aplikasi
yang
membutuhkan
kecepatan
tinggi,
motor
stepper
untuk
aplikasi
dengan
akurasi
tinggi,
dan
motor
servo untuk
gerakan-gerakan berupa gerakan
sudut.