25
mencari
posisi
dari
motor
hanya
dapat
diketahui
arah
putarannya
saja.
Dikatakan
close
loop
karena
adanya
umpan balik dimana posisis dari motor
akan
diinformasikan
ke
dalam
rangkaian
pengendali
yang
ad
di
dalam
motor
servo.
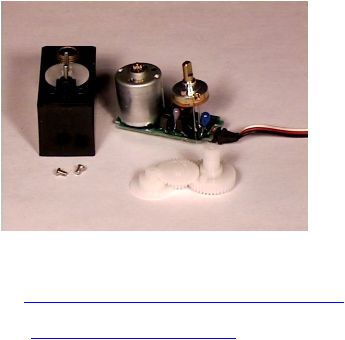
Gambar 2.8 Motor Servo
(Sumber:
otomasi/mengakses-motor-servo/)
Tiga kabel yang terdapat pada gambar diatas adalah kabel yang
menghubungkan servo dengan komponen lain, yang satu adalah power
(+5Volts),
ground,
dan
kabel
putih
adalah kabel kontrol. Motor servo
mempunyai
beberapa
rangkaian
kontrol dan
sebuah
potensiometer
(variabel
resistor, yang lebih sering disebut pot) yang terhubung dengan batang output.
Pada
gambar
diatas,
pot
dapat
dilihat
pada
sebelah
kanan
rangkaian
kontrol.
Pot ini memungkinkan rangkaian kontrol untuk
memonitor
sudut
dari
servo
motor.
Bila
batang
berada
pada
sudut
yang
benar,
maka
motor
akan
berhenti.