53
2.3.1.3. Gait 6 kaki (Hexapod)
Kebanyakan hexapod dikendalikan dengan
gait,
yang
memungkinkan
robot
untuk bergerak maju, berputar, dan mungkin
berjalan
ke
samping.
Beberapa
gait yang biasa digunakan adalah :
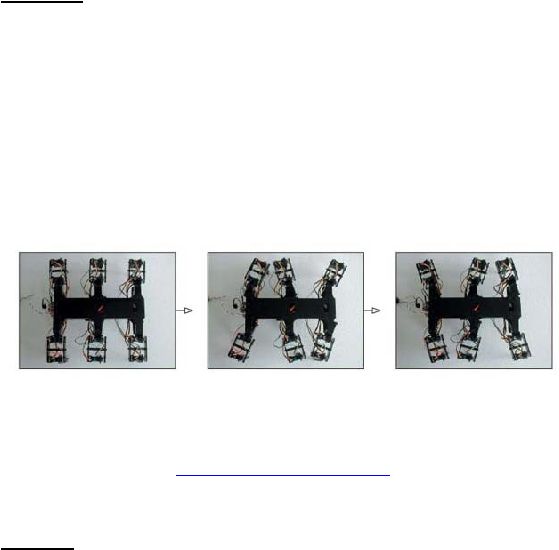
Tripod Gait
Tripod gait terdiri dari kaki depan dan kaki belakang serta kaki tengah pada
sisi lainnya. Untuk setiap tripod, kaki
diangkat,
diturunkan, dan digerakkan
maju
mundur
secara
bersamaan.
Pada saat berjalan, hexapod menggunakan
kedua tripod-nya mirip dengan biped yang melangkah dari satu kaki ke kaki
lain.
Karena
3
kaki
selalu
berada
di
tanah,
maka
gait
tersebut
akan selalu
stabil. Berikut adalah skema dari tripod gait :
Gambar 2.36 Skema Tripod gait
(Sumber: http://www.ratstar.com/?v=variant)
Wave Gait
pada wave gait, kaki bergerak secara satu persatu dimulai dari kaki paling
belakang,
kemudian
diulang
oleh
sisi
yang
lainnya.
Karena
hanya
1
kaki
yang diangkat dan menyisakan 5 kaki di tanah, maka gait ini adalah gait yang