55
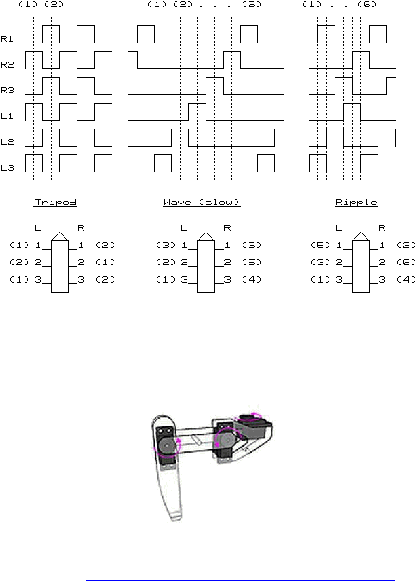
Berikut adalah sinyal PWM dari ketiga gait tersebut :
Gambar 2.38 Sinyal PWM dari Ketiga Gait
Kaki yang digunakan adalah kaki seperti berikut:
Gambar 2.39 Kaki Hexapod
(Sumber: http://www.robotshop.com/robot-leg-tutorial.html)
Hexapod
robot
biasanya
dikonfigurasikan
dengan
menggunakan
2
baris
3
kaki
(3+3)
atau
60
derajat
dari
kaki sebelahnya
dan
jarak
yang
sama
dari
tengah bodi.
Dynamic stability