18
-
Secara
umum robot
bipedal
amatlah rumit.
Perhitungan
untuk
menjaga
keseimbangan robot saat berjalan begitu rumit, penyusunan komponen sambil
menjaga keseimbangan robot pun sulit dilakukan.
-
Pembangunan robot ini membutuhkan waktu yang sangat lama, bahkan dalam
hitungan tahun.
b)
Quadpod (Robot Berkaki Empat)
Quadpod atau robot berkaki empat mempunyai tingkat kestabilan
lebih
tinggi
daripada
bipedal.
Sistem robot
ini
mempunyai
struktur
kaki
seperti
hewan
bekaki empat seperti anjing atau kuda.
Begitu juga gait yang dipakai oleh quadpod memakai refrensi dari gait
hewan berkaki empat yaitu seekor kuda seperti gallop, trot dan canter.
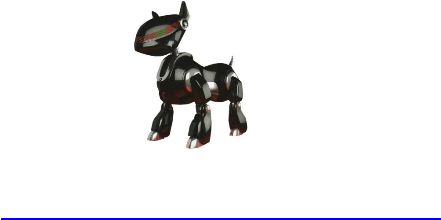
Gambar 2.6 Robot AIBO
){kind=link}
Robot quadpod komersial pertama di dunia adalah AIBO buatan Sony
dengan meniru struktur tubuh dari anjing dan juga mampu bergerak dan bertingkah
laku seperti anjing.