11
Kontrol Robot Loop Tertutup
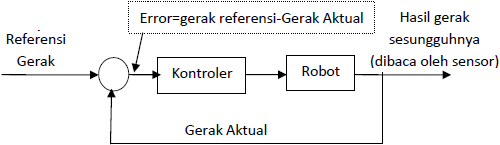
Gambar 2.3 Kontrol Loop Tertutup
Pada gambar di atas, jika hasil gerak aktual telah sama dengan
referensi, maka input kontroler akan nol. Artinya kontroler tidak lagi
memberikan sinyal aktuasi kepada robot karena target akhir perintah gerak
telah
diperoleh. Makin kecil error terhitung maka makin kecil pula sinyal
pengemudian kontroler terhadap robot, sampai akhirnya mencapai kondisi
tenang (steady state).
Referensi gerak dan gerak aktual dapat berupa posisi (biasanya
didefinisikan melalui kedudukan ujung lengan terakhir
/
end effector),
kecepatan, akselerasi, atau gabungan di antaranya. Kontrol bersifat konvergen
jika dalam rentang waktu pengontrolan nilai error menuju nol, dan keadaan
dikatakan stabil jika setelah konvergen kontroler mampu
menjaga agar error
selalu nol. Dua pengertian dasar; konvergen dan stabil, adalah sangat penting
dalam kontrol loop tertutup.
Stabil dan konvergen diukur dari sifat referensinya. Posisi akhir
dianggap konvergen bila makin lama gerakan makin perlahan dan akhirnya
diam pada posisi seperti yang dikehendaki referensi, dan dikatakan stabil jika
posisi akhir yang diam ini dapat dipertahankan dalam masa-masa berikutnya.
Jika referensinya
adalah kecepatan maka disebut stabil jika pada keadaan