33
[
l
lJ
0
0
dx
1
0
dy
0
l
dz
0
0
l
Matriks
transformasi untuk
robot
5
joint
adalab
!sinS
rosS 0
l
0
oj
[
0
g\
r« -sa
1
roosS -sin9
0
][
0
0
1
0'
0
0
0
0
1
0
[
d:
0
1
,Osmucoso.O
:
0
0
0
0
0
Ii
0
0
Lo o
o
;
J
l
J
cos e -cosasintl
sin a sine
a
cos 8
i-l.·n=
sinG
cos a cos
a
-costlsina
a
sine
0
sin
a
cos a
d
I
0
0
()
1
I
J
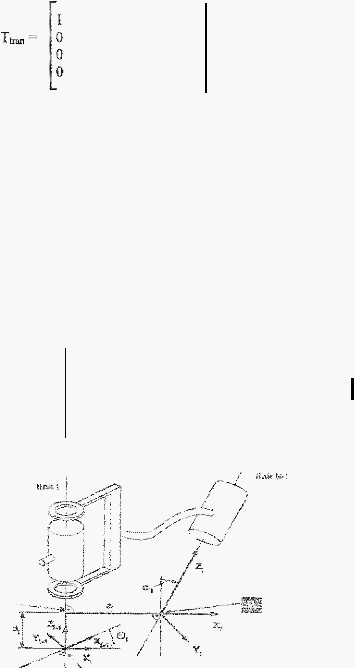
Gambar
2.20
Parameter kinematik menurut
konsep
Denavit-Hartenberg
Inverse
Kinematics
Pada Inverse
Kinematics penearian
posisi
berdasarkan
koordinat
end
effector
terhadap
koordinat obyek.
Setelab
koordinat end-effector
dan
obyek
diketahui. Lalu
robot
akan
bergerak
menuju
obyek
yang
dituju.
Inverse
kinematics
digunakan untak meneari
besarnya sudut (ei)
yang
diberikan pada setiap joint