22
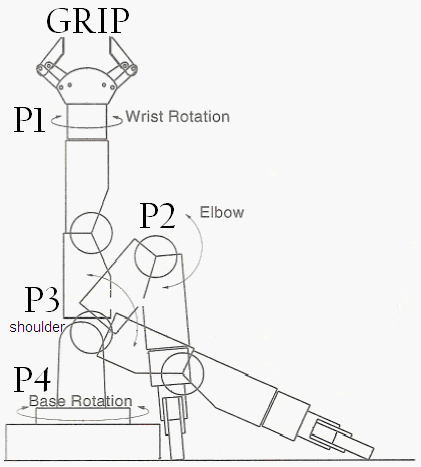
Gambar 2.9 layout pergerakan dari lengan robot
2. Pergerakan lengan robot
•
Tombol 1 = untuk menggerakan joint P1 berputar ke arah kanan.
•
Tombol 1 + L1 = untuk menggerakan joint P1 berputar ke arah kiri.
•
Tombol 2 = untuk menggerakan joint P2 ke arah atas.
•
Tombol 2 + L1 = untuk menggerakan joint P2 ke arah bawah.
•
Tombol 3 = untuk menggerakan joint P3 ke arah atas.
•
Tombol 3 + L1 = untuk menggerakan joint P3 ke arah bawah.
•
Tombol 4 = untuk menggerakan joint P4 berputar ke arah kanan.
•
Tombol 4 + L1 = untuk menggerakan joint P4 berputar ke arah kiri.