10
Lengan
robot
yang
digunakan
memakai
motor
DC
sebagai
penggerak.
Ada
5
motor
DC
yang
digunakan
untuk mengerakan
lengan
robot.
Derajat
kebebasan gerakan lengan robot dapat dilihat pada gambar 2.1 diatas.
2.1.3
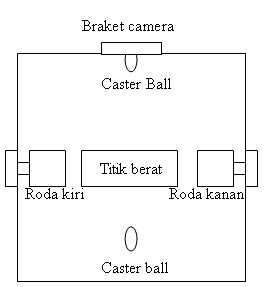
Titik Berat Mobile Robot
Titik Berat robot pada skripsi ini terletak diantara kedua roda dan kedua ball
bearing. Kestabilan robot dapat di jaga dengan
memperhatikan
agar
daerah titik berat
tidak terlalu mendekati poros roda dengan demikian keseimbangan robot dapat terjaga.
Gambar 2.2 Titik berat mobile robot
2.2
Bluetooth
Bluetooth
adalah
standar
spesifikasi
industri dalam
aplikasi
wireless
personal area network (PAN). Bluetooth juga dikenal dengan nama standar
IEEE 802.15.1. Bluetooth menyediakan saluran untuk melakukan pertukaran
informasi
antar
peralatan
seperti
telepon
seluler, notebook,
PC,
printer,
kamera
digital dan video game console melalui saluran komunikasi
radio
frekuensi
jarak