24
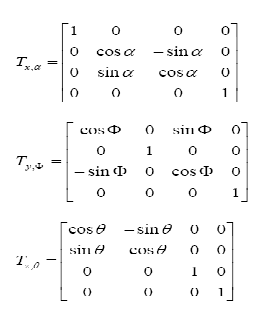
Pers (2-6)
Pers (2-7)
Pers (2-8)
Matriks-matriks
rotasi 4x4 di atas disebut juga matriks rotasi homogeneous
dasar. Pada
matriks rotasi homogeneous
faktor penskalaan di
set
1,
karena diasumsikan
tidak terjadi pembesaran pada objek jika tidak menggunakan kamera.
2.2.1.4 Konsep Denavit Hartenberg
Manipulator
mekanik
terdiri
dari
sejumlah
bagian
tubuh
yang
dinamakan
link
dan
joint. joint
digunakan
untuk
menghubungkan setiap
link-link
yang
ada.
Setiap
joint
mewakili
satu
derajat
kebebasan.
Untuk
mendeskripsikan
hubungan
translasional dan
rotasional antara link-link yang berdekatan digunakanlah konsep Denavit dan Hartenberg
sebagai
sebuah
metode
matriks
yang
secara
sistematis
membangun sebuah
sistem
koordinat
dari
masing-masing link.
Berdasarkan
Andreas
Bischo
et
al(1999.p20-21)
Dalam
mencari
sebuah
transformasi dari
sebuah
ujung
alat
hingga
basis
dari
sebuah
manipulator, ditentukan
frame dari
link-link dan
mendapatkan teknik
yang
sistematikal,
yang dapat
menjabarkan kinematika dari sebuah robot dengan n derajat kebebasan dalam
cara yang unik.