25
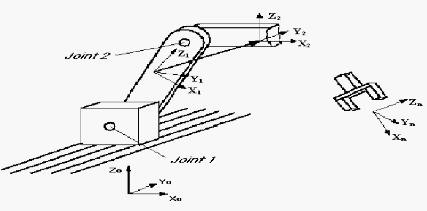
Gambar 2.9 menunjukkan link pertama dari rantai kinematika.
Pada
basis
dan
tiap
link
i
dari
rantai
tersebut
menggambarkan sebuah
frame
Ki
yang
pesifik,
yang
mana
merupakan
link.
Jadi
posisi
dan
orientasi
dari
sebuah
frame
link
berubah dengan berdasarkan frame link
yang
sebelahnya
menurut pergerakkan dari
penggabungan joint.
Maka dari
itu
koordinat
frame Ki
dapat dijabarkan dari
frame Ki-1
link
sebelumnya.
Transformasi
homogeneous
meliputi
sudut
joint
(untuk
joint
putar)
atau offset joint (untuk prismatic joint). Pada akhirnya
frame Kn dapat ditransformasikan
ke frame base dengan
mengalikan semua transformasi link dengan rantai kinematik dari
matrik
trasnfomasi
homogeneus.
Untuk
membuat
suatu
posisi/orientasi tergantung
dari
frame
alat
yang
mendekati
frame
basis
dari
manipulator
(biasanya
berada
di
lantai
bersifat permanen),
urutan dari
transformasi homogeneous
diurut dari
atas(ujung
akhir)
hingga
bawah(basis)
dengan urutan
Kn-1,Kn-2,….,K0.
Tugas
yang
tersisa
adalah
mengatur semua
matriks transformasi homogeneous
untuk sebuah tipe rantai kinematik,
mengingat sudut dari link dan tipe dari joint.