26
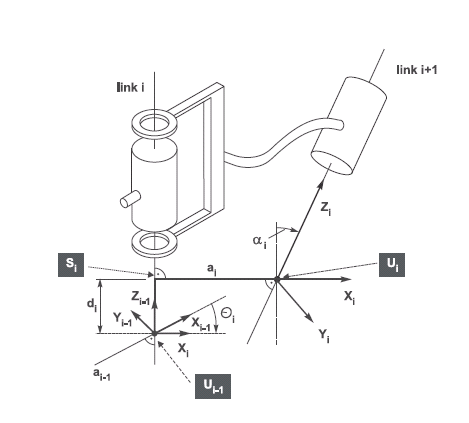
Gambar 2.10 Parameter kinematik menurut konsep Denavit Hartenberg
Berdasarkan
Andreas
Bischo
et
al(1999.p22-23) Pada
Gambar
2.10
menunjukkan rantai kinematik, dimana dua buah link yang terhubung
lewat sebuah joint
putar.
Ini
digunakan
untuk
menunjukkan
bagaimana
parameter-parameter didapat
dengan
penjabaran
link.
i
dan
i-1
adalah
joint
yang
merepresentasikan
joint
yang
satu
dengan
yang
sebelumnya.
Pada
joint
yang
ke
i,
perpotongan
garis
tegak
pada
titik
Ui
dengan
garis
lurus
ai
merupakan
frame
Ki
,
dimana
i
=
0,
1,
2,
3,
4,…,
n
(dimana
n
merupakan
jumlah
derajat
kebebasan).
Sumbu
x
didapat
dari
garis
normal
pada
frame
base
dan
searah
dengan
link
jika
bukan
base.
Sumbu
Z
merupakan
garis
lurus
yang
searah
dengan
sumbu
putar
joint,
sehingga
berdasarkan kaedah
tangan
kanan
sumbu
y
bisa
didapatkan.
Kaedah
tangan
kanan
didefinisikan
sebagai
perluasan
ibu
jari,
jari