28
•
di
adalah
jarak
dari
pusat
koordinat
kerangka/sumbu koordinat
ke-(i
–
1)
ke
perpotongan sumbu
zi
–
1
dengan sumbu
zi
–
1
dengan sumbu
xi
sepanjang
sumbu zi – 1.
•
ai
adalah jarak/panjang perpotongan sumbu
zi
–
1
dengan sumbu xi ke
pusat
kerangka/sumbu koordinat
ke-i
sepanjang
sumbu
xi
(atau
jarak
terpendek
antara sumbu zi – 1dan sumbu zi).
•
ai (alpha) adalah sumbu dari sumbu
zi –1 ke
sumbu
zi dengan poros sumbu
xi (perputarannya dengan menggunakan aturan tangan kanan).
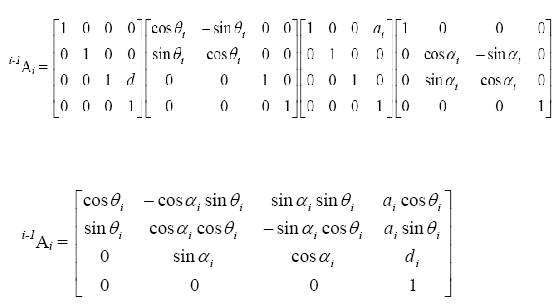
Masing-masing dari
keempat
pertimbangan
di
atas
dapat
dilakukan
perhitungan
dengan cara
matriks homogeneous
rotasi-translasi dan
hasil
dari
keempat
matriks
tersebut
adalah
matriks
transformasi berdasarkan konsep
Denavit
Hartenberg
untuk
sistem
koordinat
berdekatan i-1Ai,
yaitu
sistem
koordinat
i
dan
sistem
koordinat
i-1,
untuk joint putar adalah:
i-1Ai = TZ,d . TZ,? . TX,a . TX,a
Pers (2-10)