29
2.2.2 Inverse Kinematics
Inverse Kinematics
merupakan pengendalian posisi dan
orientasi dari
end
effector
robot
untuk
mencapai
suatu
objek
di
dalam
sistem
koordinat.
Berdasarkan
posisi
dan
orientasi yang
ingin dicapai, inverse kinematics digunakan untuk
mencari besarnya sudut
(?i) yang harus diberikan pada setiap joint (i) manipulator untuk mendapatkan posisi dan
orientasi tersebut (Fu, Gonzales dan Lee, 1987, p52).
Berdasarkan
Craig
(1989,
p114-118),
kemungkinan adanya
solusi
perlu
diketahui
dahulu
sebelum
melakukan
pencarian
nilai
?i.
Kemungkinan
untuk
mendapatkan solusi
sangat
penting
untuk
diketahui,
hingga
perhitungan untuk
mencari
solusi
tidak
perlu
dilakukan
apabila
tidak
ada
jaminan
bisa
mendapatkan solusi.
Ada
tidaknya
solusi
berhubungan erat
dengan
area
jangkauan
(workspace)
robot.
Area
jangkauan
adalah
volum
ruang
yang
dapat
dicapai
oleh
end
effector
manipulator. Apabila
posisi
dan
orientasi
(titik
tujuan)
dari
end
effector
berada
di
dalam
area
jangkauan, maka
sekurangkurangnya
terdapat satu
solusi.
Apabila
solusinya ada,
maka kemungkinan
lain
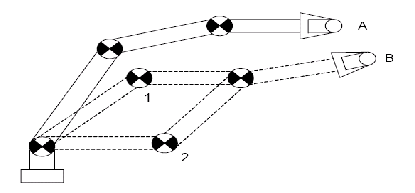
yang bisa terjadi adalah solusinya
lebih dari
satu (multi solusi). Hal
ini
menjadi masalah
karena sistem dituntut hanya bisa memilih satu solusi saja.
Gambar 2.11 Dua solusi untuk satu posisi