33
•
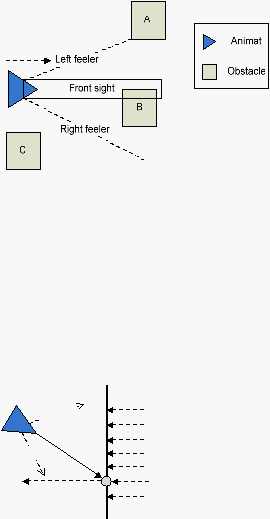
Obstacle
avoidance:
a
procedure
to
detect
and
avoid
obstacles
within
sight range. Aside
from
front
sight,
it
uses
additional detector
in
the
left
and right side, which is called as “feeler”.
Figure 2.1.2.4. g. Steering Behavior: Obstacle Avoidance
•
Wall avoidance: a procedure to detect and avoid wall by using left feeler,
right feeler, and ray tracing.
Left feeler
Right feeler
Reaction
force
Figure 2.1.2.4.h. Steering Behavior: Wall Avoidance
Each
of
the
steering
basic
has
its
own
inputs
and
a
single
objective,
movement.
Therefore,
to
achieve
more
complex
movement
that
is
close
to
human
perception
of
realistic, it
requires
the
developer to
be
an
“artist”
to
tweak
and
combine
necessary basic steering components.